

Coupling three-container liquid level control method based on port controlled Hamiltonian principle
A technology of Hamiltonian principle and control method, applied in the field of electro-hydraulic position servo control, can solve the problems of large computational complexity, robustness and anti-interference performance to be improved, unclear physical meaning of the controller, etc., so as to reduce the complexity degree, the effect of realizing the control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
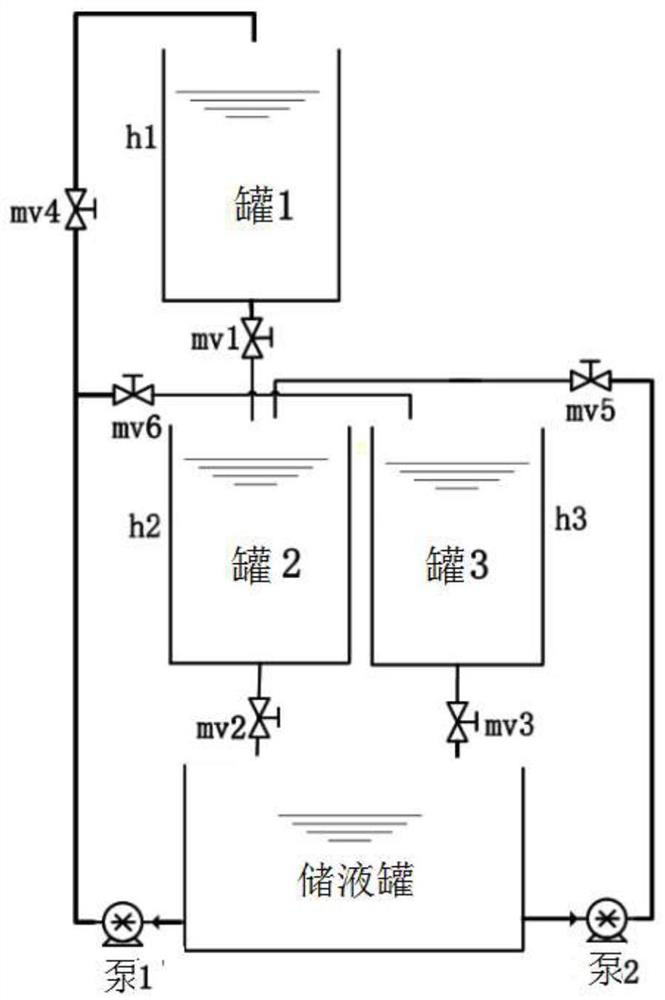
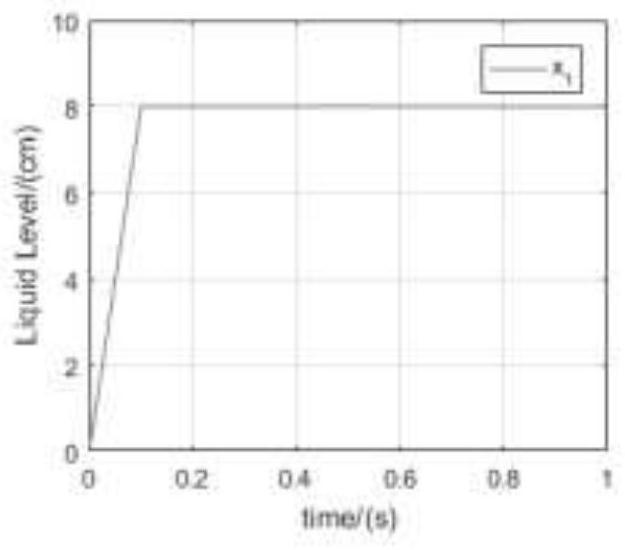
[0138] S1: Build figure 1 The three-volume level control system shown:
[0139] Pump 1 supplies liquid to tank 1 through manual valve mv4, and supplies liquid to tank 3 through valve mv6; pump 2 supplies liquid to tank 2 through valve mv5. The liquid in tank 1 flows into tank 2 through valve mv1, and the liquid in tank 2 and tank 3 flows into the liquid storage tank through valve mv2 and valve mv3 respectively. There are liquid level ultrasonic sensors on top of each tank. Its model can be expressed as:
[0140]
[0141] where: h i is the liquid level of tank i, A i is the cross-sectional area of tank i, i=1,2,3; a j for manual valve mvmv j The cross-sectional area can be adjusted manually, j=1,2,3,4,5,6; g is the acceleration due to gravity.
[0142] The state and input of the system are defined as:
[0143] x(t)=[h 1 (t), h 2 (t), h 3 (t)] T , u(t)=[q 1 (t),q 2 (t)] T (2)
[0144] According to formulas (1) and (2), the mathematical model of the three-vo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More