

Composite anti-interference control method of generalized time-delay Markov jump system
A jump system and control method technology, applied in the field of Markov system control, can solve problems such as hidden dangers of system stability, difficult application, lack of extensiveness, etc., and achieve simple and efficient control methods, strong practicability, and conservativeness. small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0100] The present invention will be described in further detail below in conjunction with the accompanying drawings.
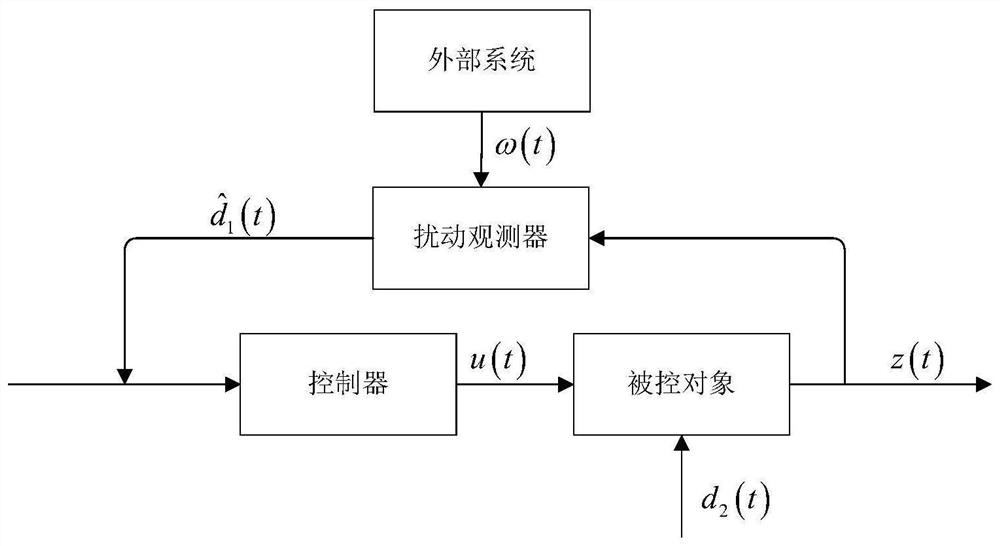
[0101] Such as figure 1 As shown, the present invention is a time-delayed generalized Markov jump system with multiple perturbations in DOBC and H ∞ Composite control under performance metrics. The specific operation steps are as follows:
[0102] Step 1: Construct the system model of the generalized time-delay Markov jump system:
[0103]
[0104] In the simulation, considering that the Markov transition mode of the system is 2, the transition probability of the Markov process is generalized matrix Delay Derivative Upper Bound Delay upper bound The time-varying delay of the system τ(t)=0.1sin(5t)+0.1.
[0105] The remaining parameters of the system are:
[0106] Modal one:
[0107]
[0108] C 11 =[0.5 0.6], C 21 =[0.2 0.1], V 1 =[3 0]
[0109]
[0110] Mode two:
[0111]
[0112] C 12 =[0.5 0.1],C 21 =[0.1 0.2], V 2 =[1 0]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More