Motion capturing system and method based on CAN bus and inertial sensor
A CAN bus and inertial sensing technology, applied in the input/output process of instruments, data processing, input/output of user/computer interaction, etc., can solve the problem that the size and weight are not easy to reduce, and the connection of data gathering nodes increase, the entire system cannot be used, etc., to achieve the effect of fast attitude calculation speed, simple connection, and reliable data transmission rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
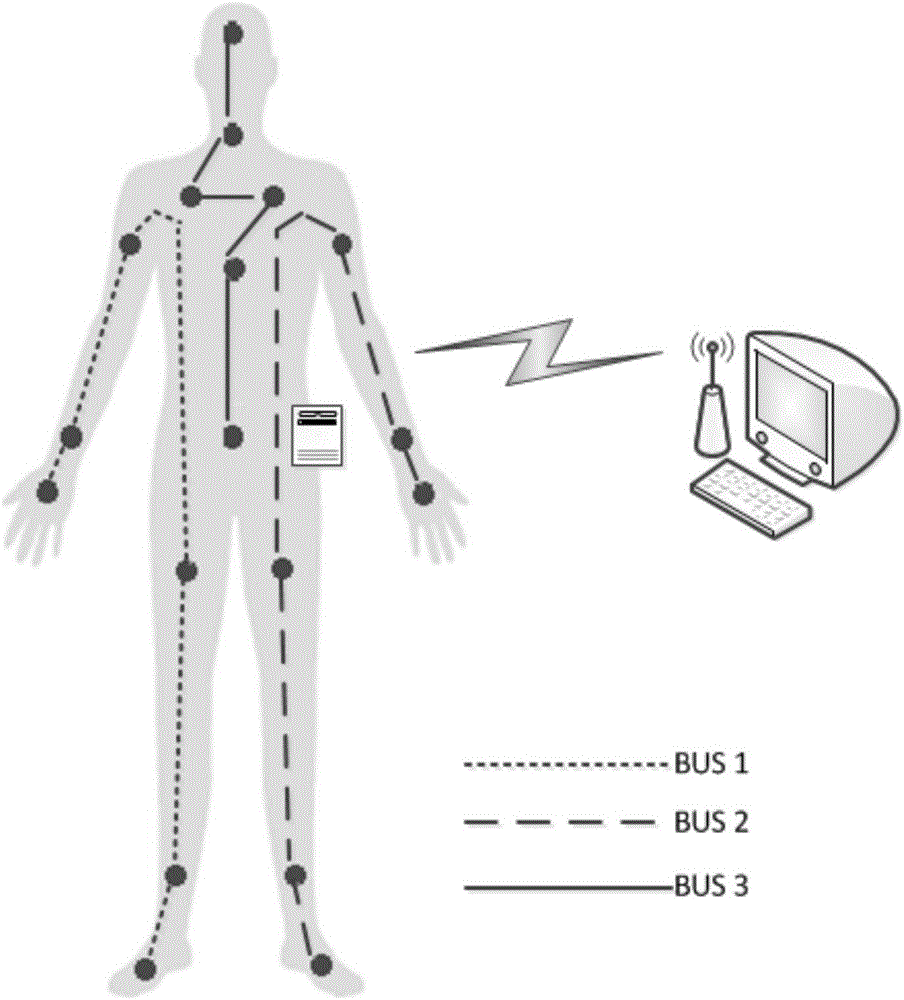
[0050] like figure 1 As shown, a motion capture system based on CAN bus and inertial sensors is composed of 18 inertial sensor nodes, data aggregation nodes and a central computer. The 18 inertial sensing nodes are respectively placed in such as figure 1 At the said marked bone point, the data gathering node is placed at the waist of the human body. The data aggregation node sends the data to the central computer through the wireless wifi module by collecting the attitude-resolved data of the 18 inertial sensor nodes.
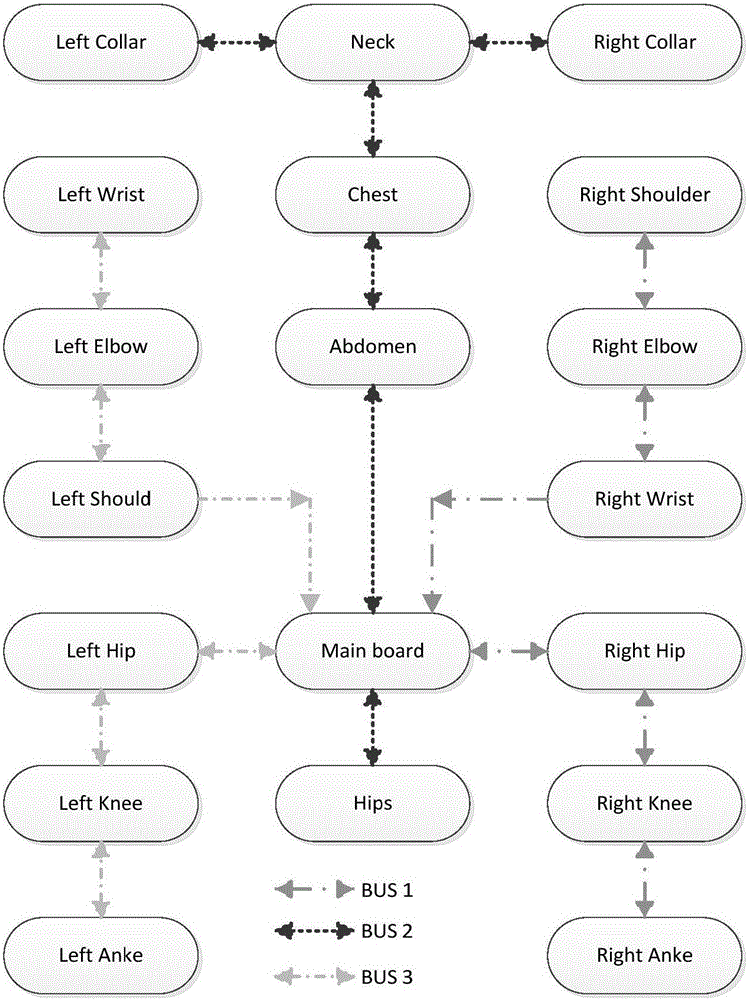
[0051] like figure 2 As shown, the 18 inertial sensor nodes are divided into 3 groups, each group contains 6 nodes, which belong to Bus1, Bus2 and Bus3 respectively. Among them, Bus1, Bus2 and Bus3 are also divided into two sections: the upper section and the lower section. This design can make the overall connection of the system the least and the wiring is convenient and simple. 18 inertial sensing nodes are placed on the user's head, left palm, left low...
Embodiment 2
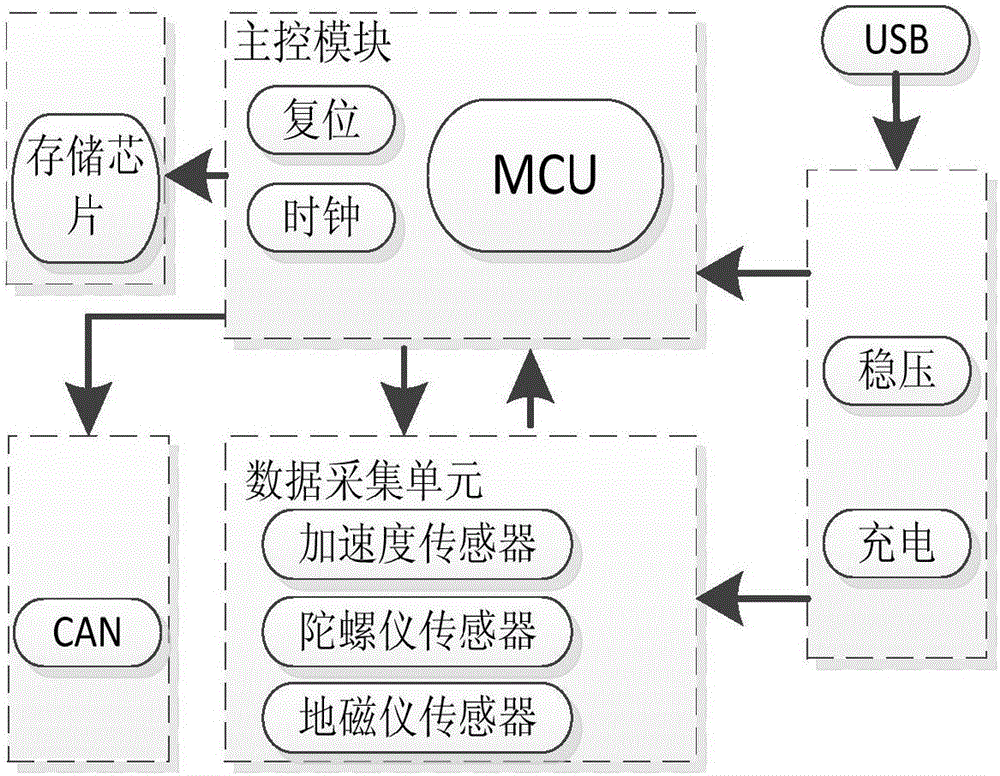
[0055] A motion capture system based on a CAN bus and an inertial sensor includes an inertial sensor node group, a data aggregation node and a central computer. The main task of the inertial sensor node group is to complete the data acquisition, filtering and attitude calculation of the three-axis acceleration, three-axis gyroscope and three-axis geomagnetism sensor of the nine-axis inertial sensor node. Quaternion or Euler angle description of spatial attitude information. The obtained quaternion or Euler angle data is converged to the data sink node in the form of CAN bus, and the data is encapsulated into a motion data frame and sent to the central computer through the wireless wifi module. The central computer first begins to create a virtual 3D character, and the initialization action is consistent with the human body action. After receiving the motion data frame, the real-time animation demonstrates the user's real-time action.
[0056] The working steps of the motion c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com