

A dynamic variable sampling area rrt path planning method for unmanned vehicles
A sampling area and path planning technology, which is applied in the direction of motor vehicles, non-electric variable control, vehicle position/route/height control, etc., can solve the discontinuous and tortuous path planning of unmanned vehicles, which does not meet the dynamic constraints of unmanned vehicles , local optimum, and regional stagnation, to avoid falling into local optimum and regional oscillation, improve node search efficiency, and avoid regional stagnation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
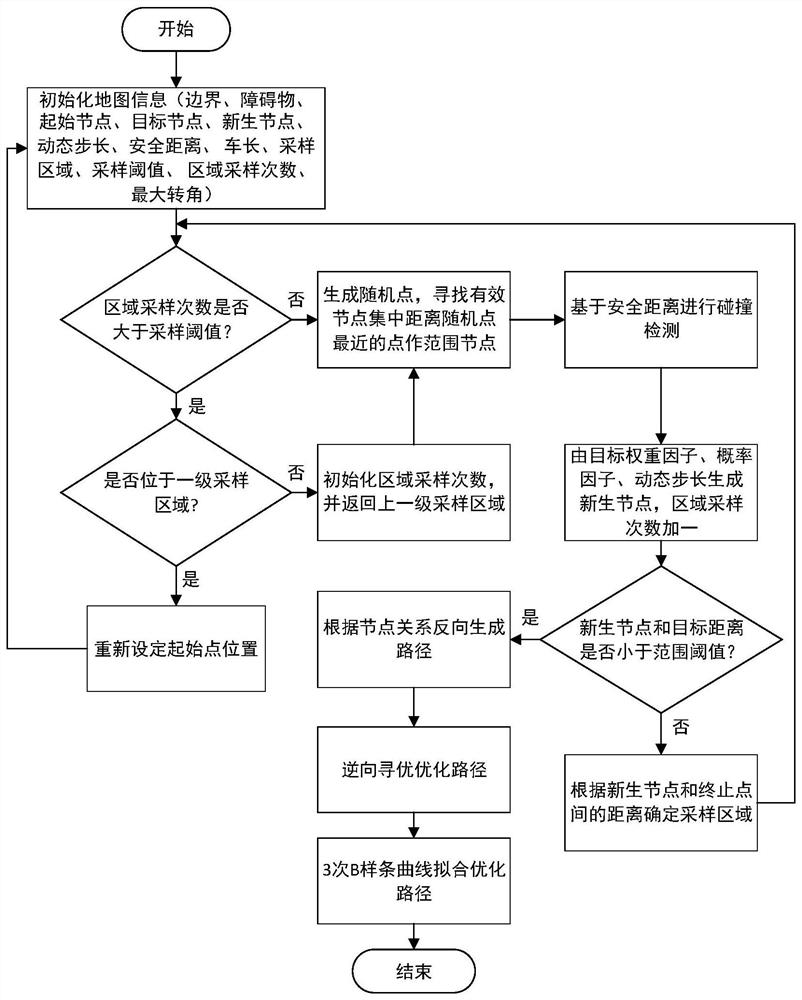
[0060] Below in conjunction with specific embodiment and figure 1 The present invention is described in detail:
[0061] The invention relates to a method for path planning of an RRT unmanned vehicle based on a dynamic variable sampling area based on a probability target offset RRT. The RRT algorithm has powerful search capabilities, but due to the blindness and randomness of its global sampling, its search efficiency is insufficient, and the planned path is tortuous and discontinuous, so it is difficult to directly carry out practical applications. For this reason, the present invention provides a method based on dynamic The probability target bias RRT unmanned vehicle path planning method of the variable sampling area uses the method of dynamically variable sampling area to control the sampling interval and reduce the global blindness of the node selection of the rapid expansion random tree algorithm; the dynamic probability target bias strategy is used to realize random Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More