

A multi-axis motion and serial manipulator compound drive four-mirror polishing machine tool
A multi-axis motion, manipulator technology, applied in manipulators, grinding drives, optical surface grinders, etc., can solve the problems of uncertain surface quality, poor processing flexibility, poor adaptability to complex optical surfaces, etc., to achieve fast response speed, guaranteed The effect of machining quality, increased flexibility and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
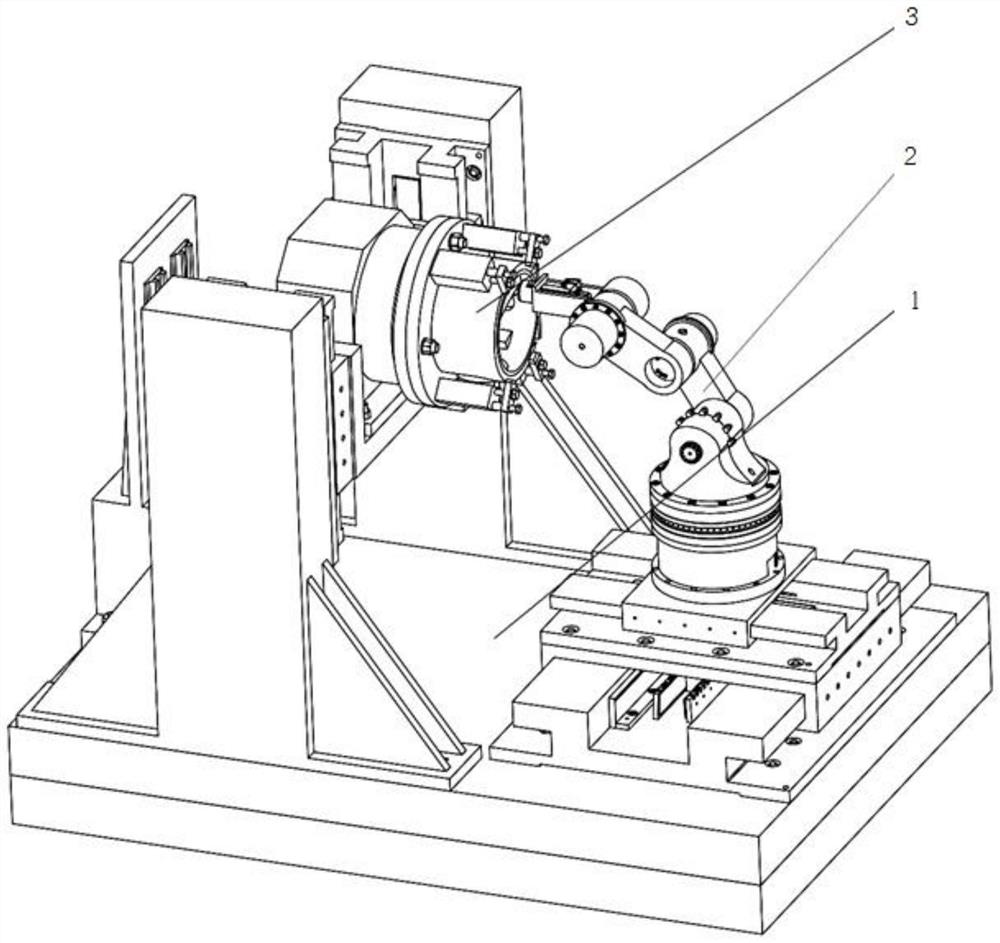
[0054] see e.g. figure 1 , a multi-axis motion and tandem manipulator compound drive four-mirror polishing machine tool, including a five-axis motion machine tool 1, a serial manipulator tool 2, and a workpiece fixture device 3, wherein the five-axis motion machine tool 1 includes five degrees of freedom, three of which are Translational degrees of freedom and two rotational degrees of freedom, arranged horizontally.
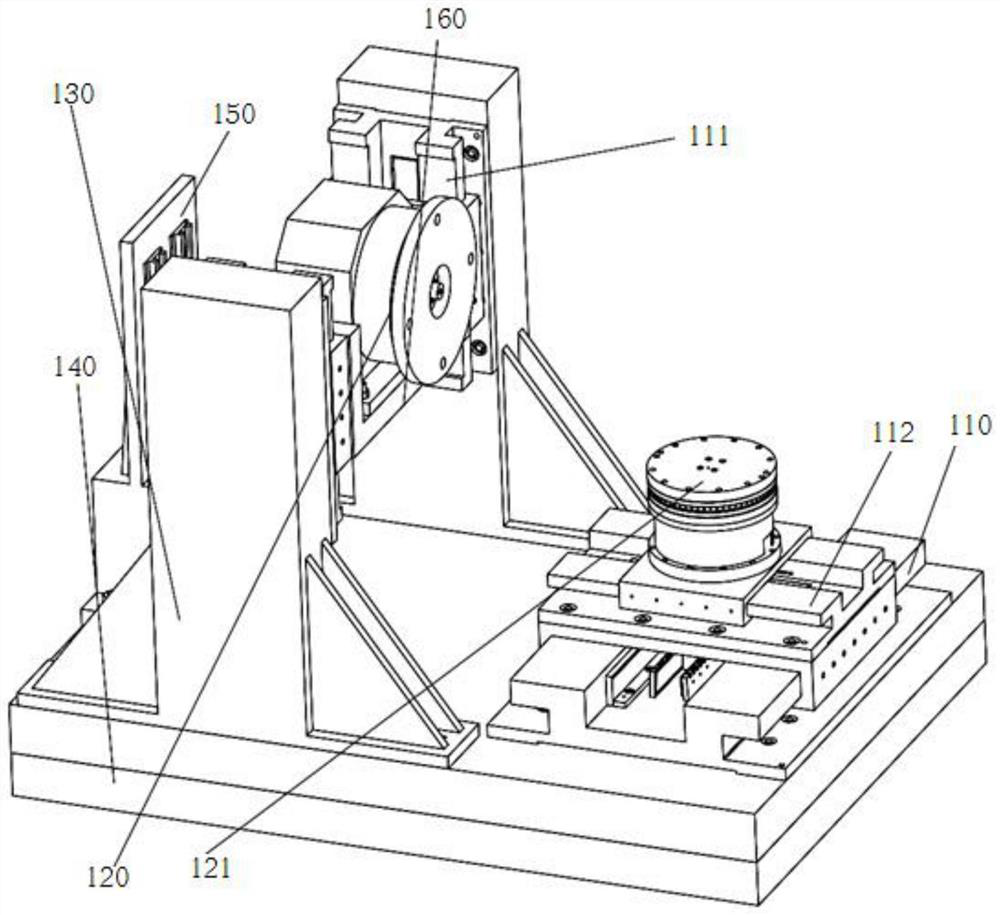
[0055] The workpiece fixture 3 is fixedly installed on the B-direction rotating platform assembly 120 of the moving machine tool through screws or bolts; one end of the serial robotic arm tool 2 is fixedly installed on the C-direction rotating platform of the moving machine tool through screws or bolts On the assembly 121 , a polishing tool head 270 is provided at the other end of the serial robotic arm tool 2 , and the serial robotic arm tool 2 cooperates with the workpiece fixture 3 to perform polishing processing on the optical curved surface of the workpiece...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More