

Acting force-displacement-vision hybrid control method for robot tracheal intubation
A technology of tracheal intubation and mixed control, applied in the field of medical devices, can solve the problems of direct mixed use of visual images and force, and achieve the effect of efficient insertion and accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
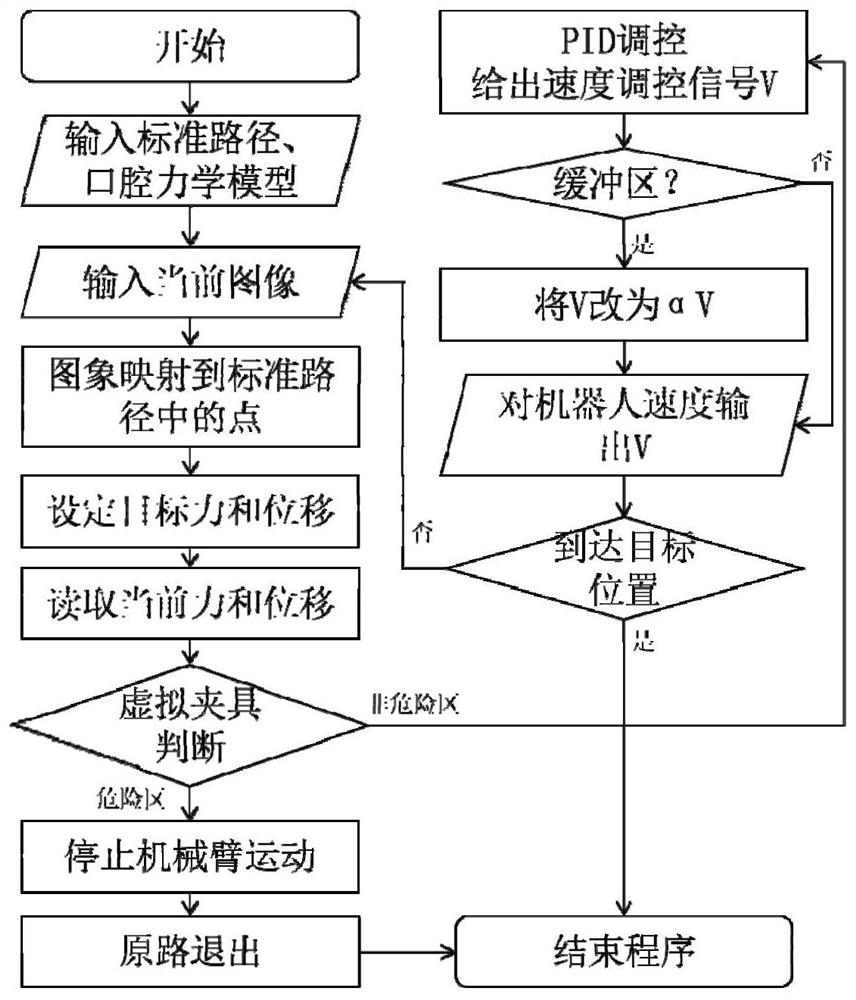
[0020] Intubation robot proposed by the present invention, the force - displacement - visual hybrid control method, firstly oral intubation and mechanical model of the standard path, the standard path to give the corresponding point by visual image map, respectively, according to the robot apparatus, the standard path, and mechanical model, read theory and practice of displacement and force information, using the method of determining the virtual clip area safety the safety partition using parallel PID speed regulation of the regulatory manipulator movement.
[0021] The robot intubation force - displacement - visual hybrid control method flow diagram as figure 1 Shown, includes the following steps:
[0022] (1) based on historical data robotic intubation, the establishment of forces mouth - displacement - mapping between visual;
[0023] Force (2) Step (1) - Displacement - visual mapping between the path and the set input standard robot;
[0024] (3) during intubation robot, robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More