Multi-robot dynamic target tracking cooperative control method
A dynamic target, multi-robot technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inability to real-time planning, large amount of calculation, etc., to improve speed, improve real-time performance, and reduce calculation. amount of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
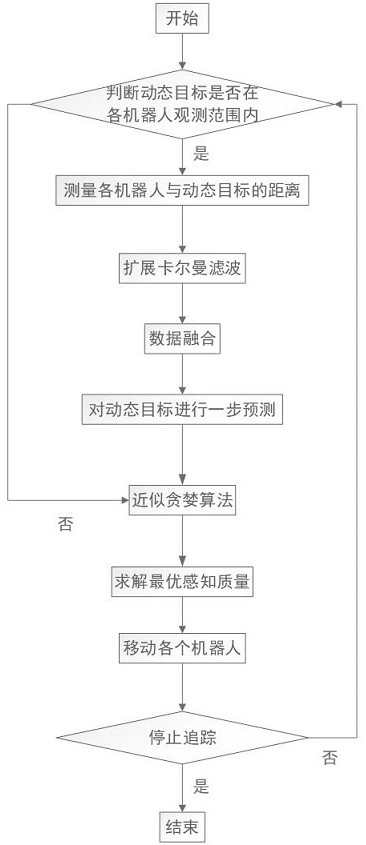
[0032] The invention discloses a new multi-robot dynamic target tracking cooperative control method, including a dynamic target G and n robots observing the dynamic target G, such as figure 1 shown, including the following steps:
[0033] Step 1, establish a generalized model of the target tracking system of the dynamic target, including the kinematics model of the dynamic target and the observation model of the target tracking system. Judging whether the dyn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More