Ultrasonic osteotome clamping device of spinal surgery robot
A surgical robot and clamping device technology, applied in the field of surgical robots, can solve the problems of inability to guarantee surgical accuracy and surgical stability, and achieve the effect of improving accuracy and stability and being widely used
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
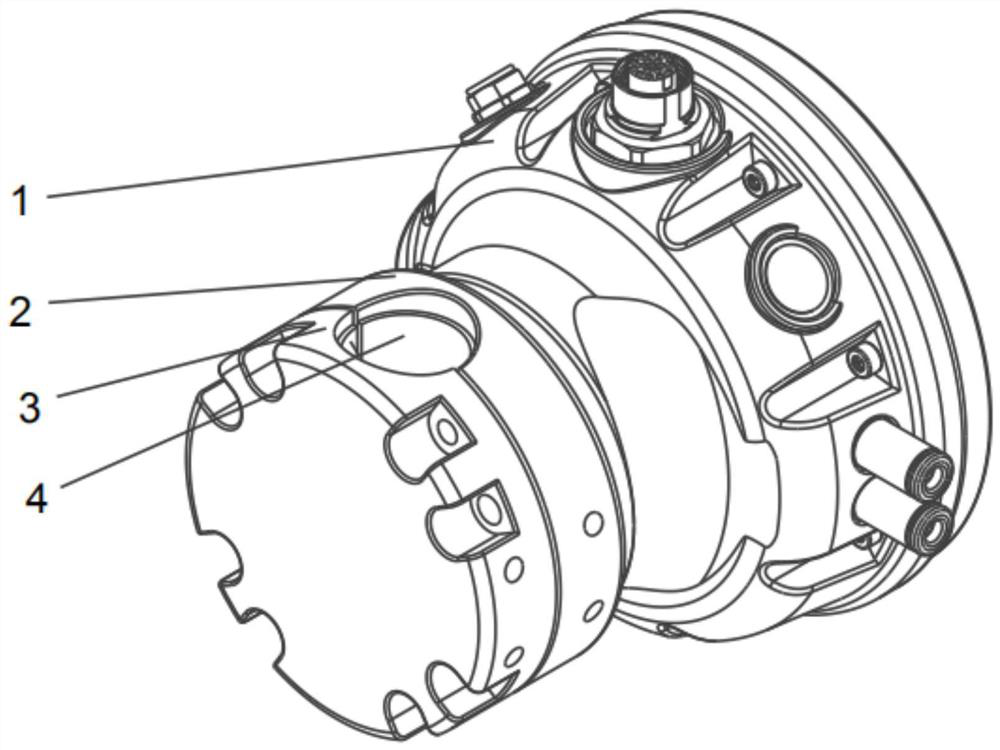
[0010] Specific implementation mode one: combine Figure 1 to Figure 11 Describe this embodiment. This embodiment includes a mechanical connection end 1, a bone knife support base 2, a locking end 3 and a clamping sleeve 4. The mechanical connection end 1 is connected to the end effector of a spinal surgery robot, and the bone knife support base 2 is installed On the mechanical connection end 1, the locking end 3 is buckled and installed on the bone knife support base 2, and the locking end 3 is buckled with the bone knife support base 2 to form a mounting hole 5, and the clamping sleeve 4 is installed in the mounting hole 5, the bone knife is embedded in the clamping sleeve 4, and the clamping sleeve 4 and the bone knife are clamped by bolts between the bone knife support seat 2 and the locking end 3.
[0011] The structure of this embodiment is simple, and it is matched with the end effector of the spinal surgery robot when it is in use. The tightening degree of bolt contro...
specific Embodiment approach 2
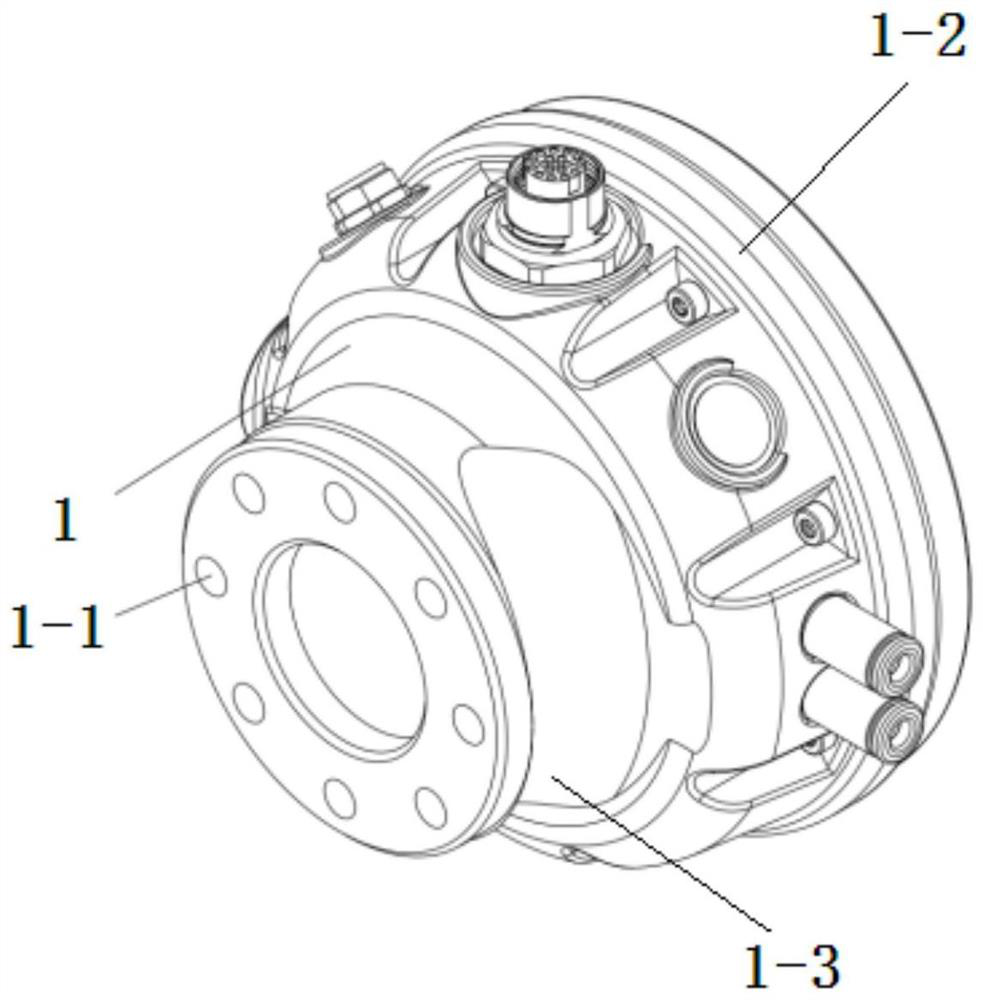
[0013] Specific implementation mode two: combination figure 2 Describe this embodiment, the mechanical connection end 1 of this embodiment includes a connecting part 1-2 and a mounting part 1-3, both of which are cylindrical, and the mounting part 1-3 is mounted on the connecting part 1-2, the connecting part 1-2 is connected to the end effector of the spinal surgery robot, and the outer diameter of the connecting part 1-2 is smaller than the outer diameter of the mounting part 1-3. Such setting facilitates the connection with the end effector of the spinal surgery robot and the bone knife support base 2 to play the role of connection and fixation. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0014] Specific implementation mode three: combination figure 2 To describe this embodiment, a plurality of connecting threaded holes 1-1 are opened in an annular array on the side end surface of the mounting portion 1-3 in this embodiment. Set up like this for easy connection. Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap