

Ground unmanned platform path planning method based on improved global fruit fly optimization algorithm
An unmanned platform and path planning technology, applied in vehicle position/route/height control, non-electric variable control, instruments, etc., can solve problems such as reducing uniformity, failing to achieve path planning effects, and algorithms falling into local optimum, etc., to achieve achieve a balanced effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
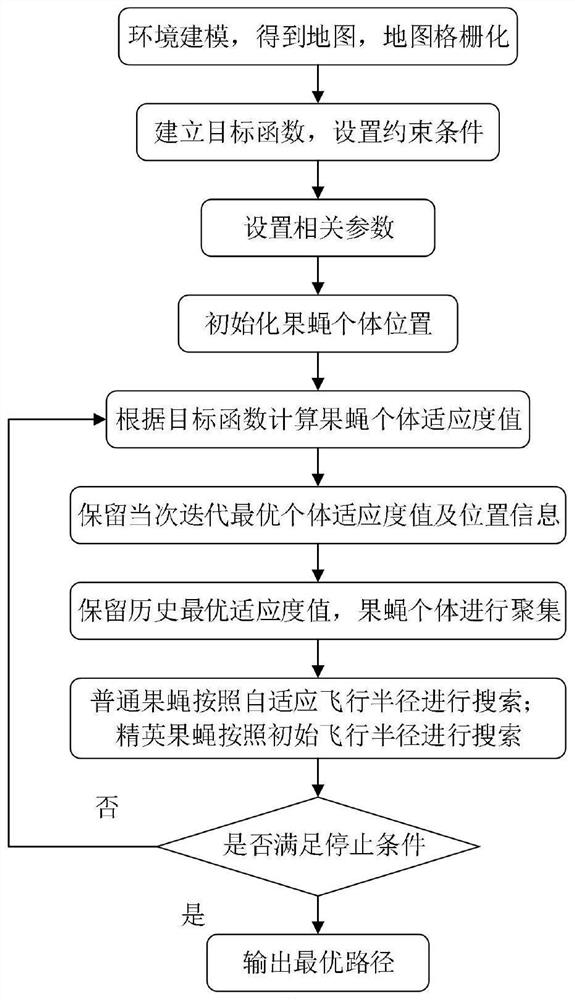
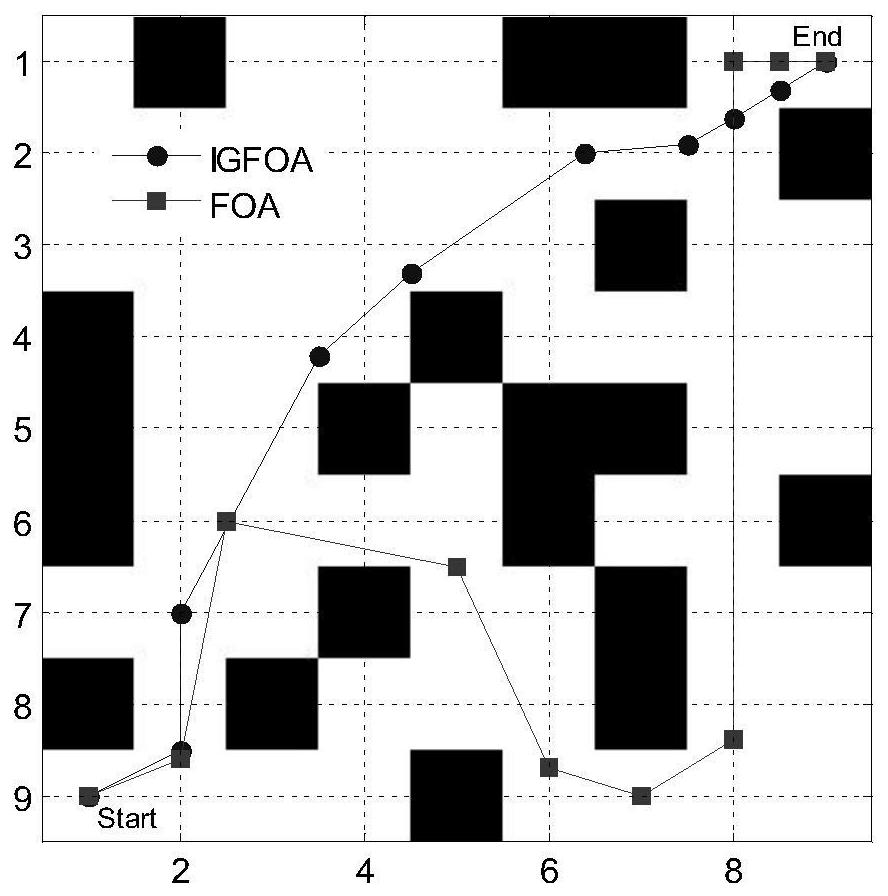
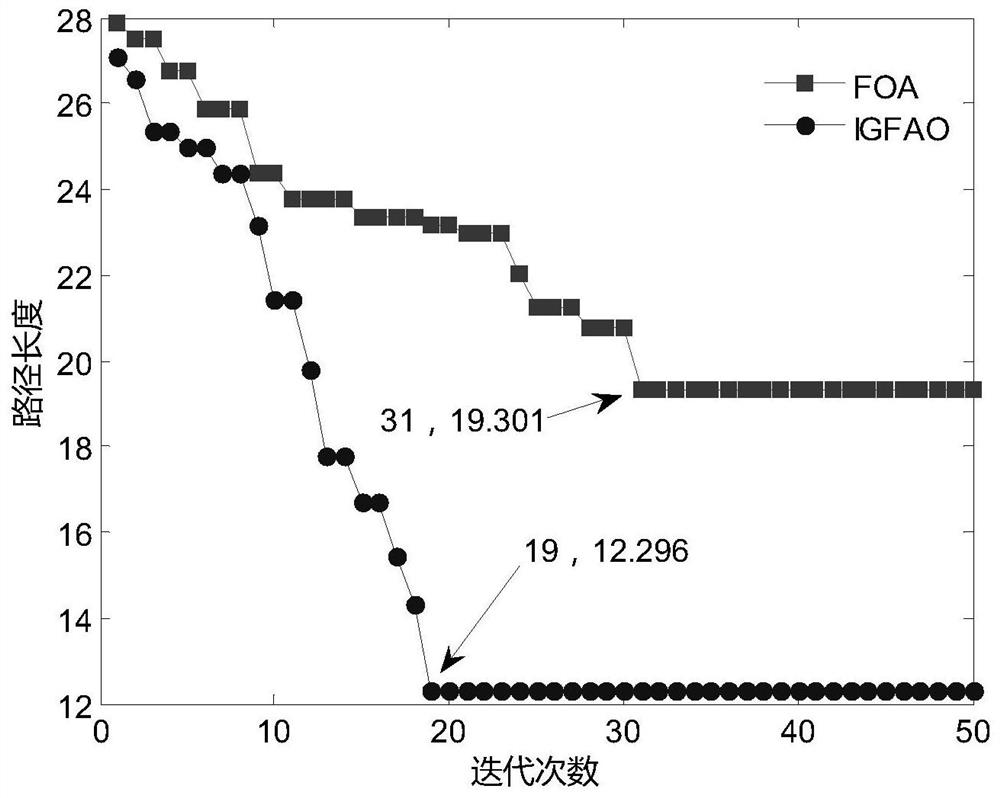
[0056] see Figure 1~3 , the embodiment of the present invention provides a ground unmanned platform path planning method based on the improved global fruit fly algorithm, the method comprising:
[0057] Obtain the objective function of the path planning of the ground unmanned platform.
[0058] The individual positions of fruit flies are randomly generated within the set search range.
[0059] Substitute the position of each fruit fly individual into the ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More