

Quadruped robot blind guiding system and method
A technology of quadruped robot and blind guidance system, applied in the field of quadruped robot blind guidance system, can solve the problem of no traction device and path planning, voice interaction, no fast and stable path planning, no robot without active perception of environmental information and acquisition and other issues to achieve the effect of improving the ability to live independently and reducing the probability of injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
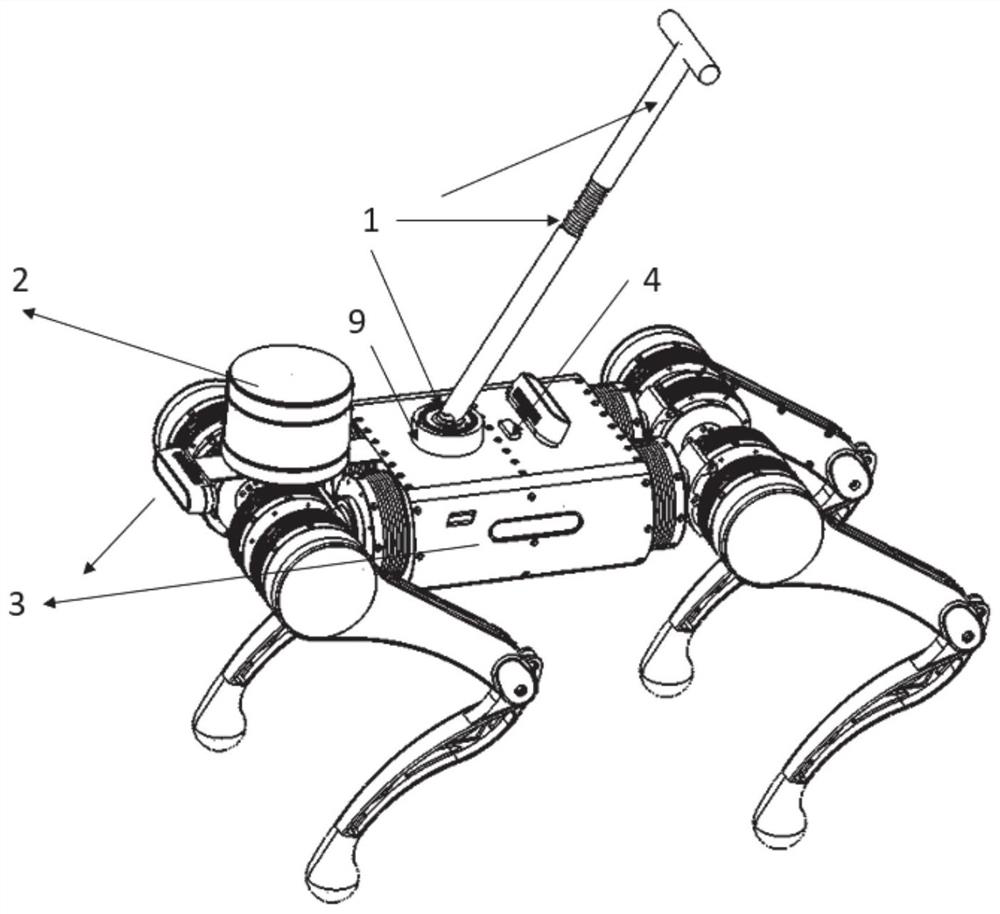
[0044] In this embodiment, a quadruped robot blind guide system is disclosed, including:
[0045]The environment information acquisition module is used to acquire the three-dimensional point cloud information of the environment;
[0046] The environment perception and exploration module is used to semantically model the environment according to the 3D point cloud information to form an incremental grid map; according to the semantic information of the incremental grid map, people in the environment and guide robots can pass through in parallel The area of the passable map is formed; dynamic obstacles are marked in the passable map to form a composite map of the environment;
[0047] The path planning module is used to analyze the composite map of the environment by using the probabilistic road map, obtain all global paths suitable for robot movement, and select the optimal global path from all the global paths;
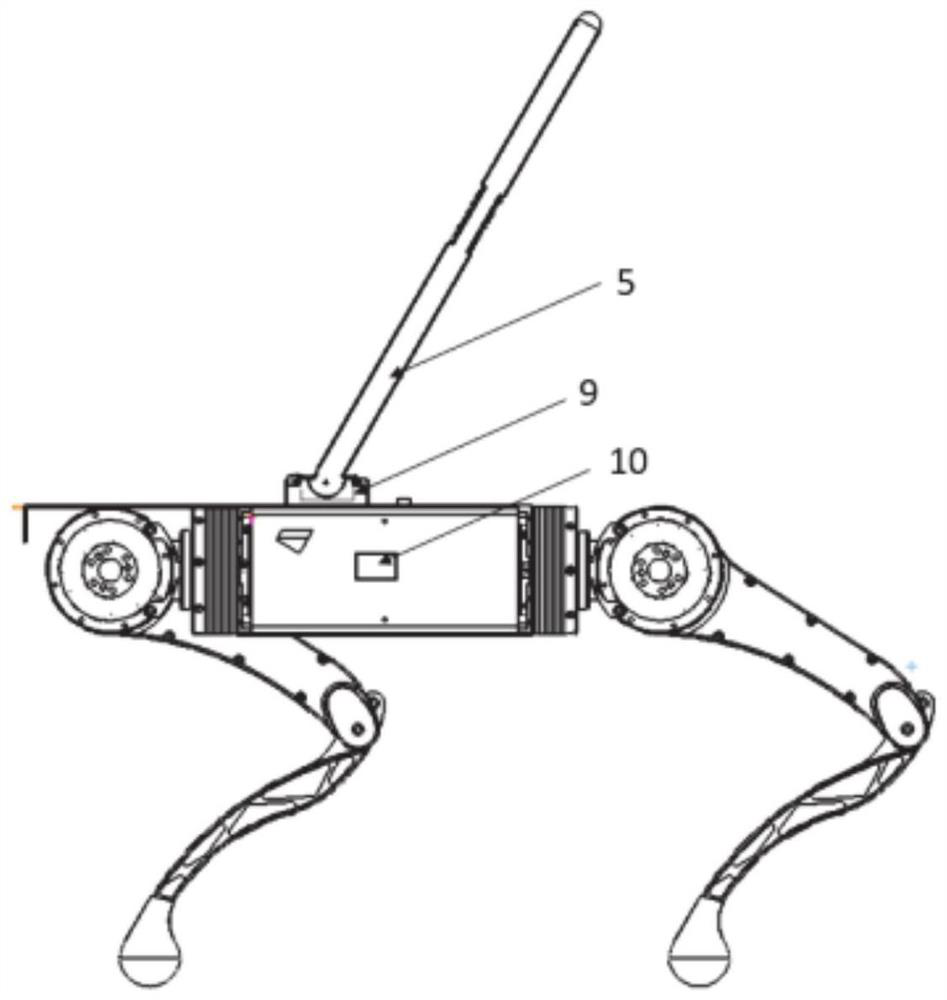
[0048] The robot is used to guide the user to move along the ...
Embodiment 2
[0078] In this embodiment, a quadruped robot guiding method is disclosed, including:
[0079] Obtain the 3D point cloud information of the environment;
[0080] Carry out semantic modeling of the environment according to the 3D point cloud information to form an incremental grid map; obtain the areas in the environment where people and blind guide robots can pass in parallel according to the semantic information of the incremental grid map to form a passable map; Mark dynamic obstacles in the passable map to form a composite map of the environment;
[0081] Use the probabilistic road map to analyze the composite map of the environment, obtain all global paths suitable for robot movement, and select the optimal global path from all global paths;
[0082] The robot moves along the optimal global path.
Embodiment 3
[0084] In this embodiment, an electronic device is disclosed, including a memory, a processor, and computer instructions stored in the memory and executed on the processor. When the computer instructions are executed by the processor, a method disclosed in Embodiment 2 is completed. The steps described in a quadruped robot guiding blind method.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More