

A Brain-Computer Interface-Based Automated Assistance Method for Robotic Arms
A technology of brain-computer interface and robotic arm, which is applied in the field of brain-computer interface application research, can solve the problems of not fully utilizing the characteristics and advantages of brain-computer interface and robotic arm, so as to improve the ability of independent living, reduce burden, and facilitate Applied effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
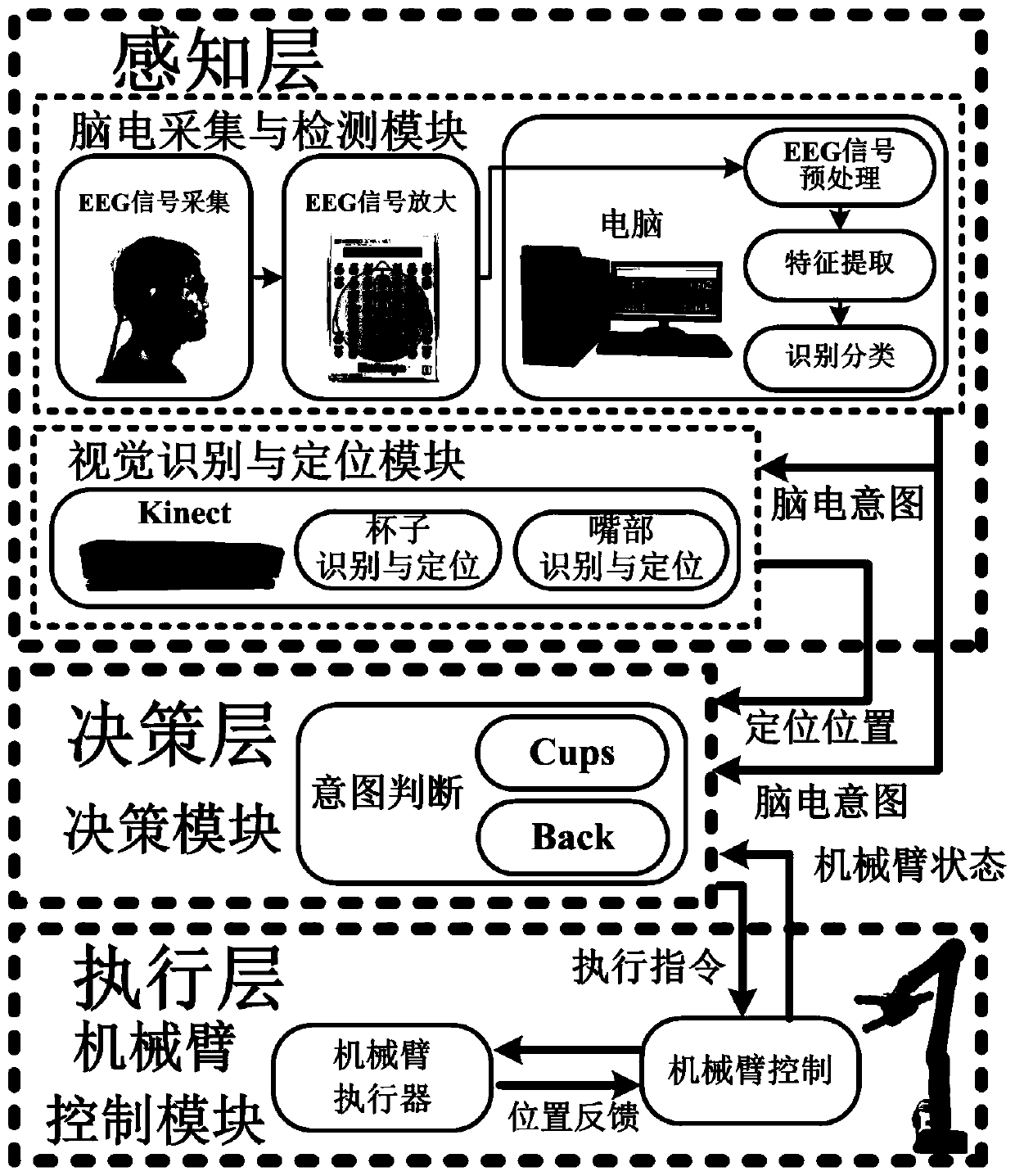
[0046] Such as figure 1 As shown, this embodiment provides a brain-computer interface-based robotic arm autonomous assistance system. The system is built according to the three-layer structure of the perception layer, decision-making layer, and execution layer. The perception layer includes EEG acquisition and detection modules and visual recognition and a positioning module, the EEG acquisition and detection module is used to collect EEG signals, analyze and identify user intentions, and the visual recognition and positioning module is used to identify and locate the corresponding cup and the position of the user's mouth according to the user intention position; the execution layer includes a manipulator control module, which is a carrier for assisting people in actual operations, and performs trajectory planning and control on the manipulator according to the execution instructions received from the decision-making module; the decision-making layer includes A decision-making...
Embodiment 2
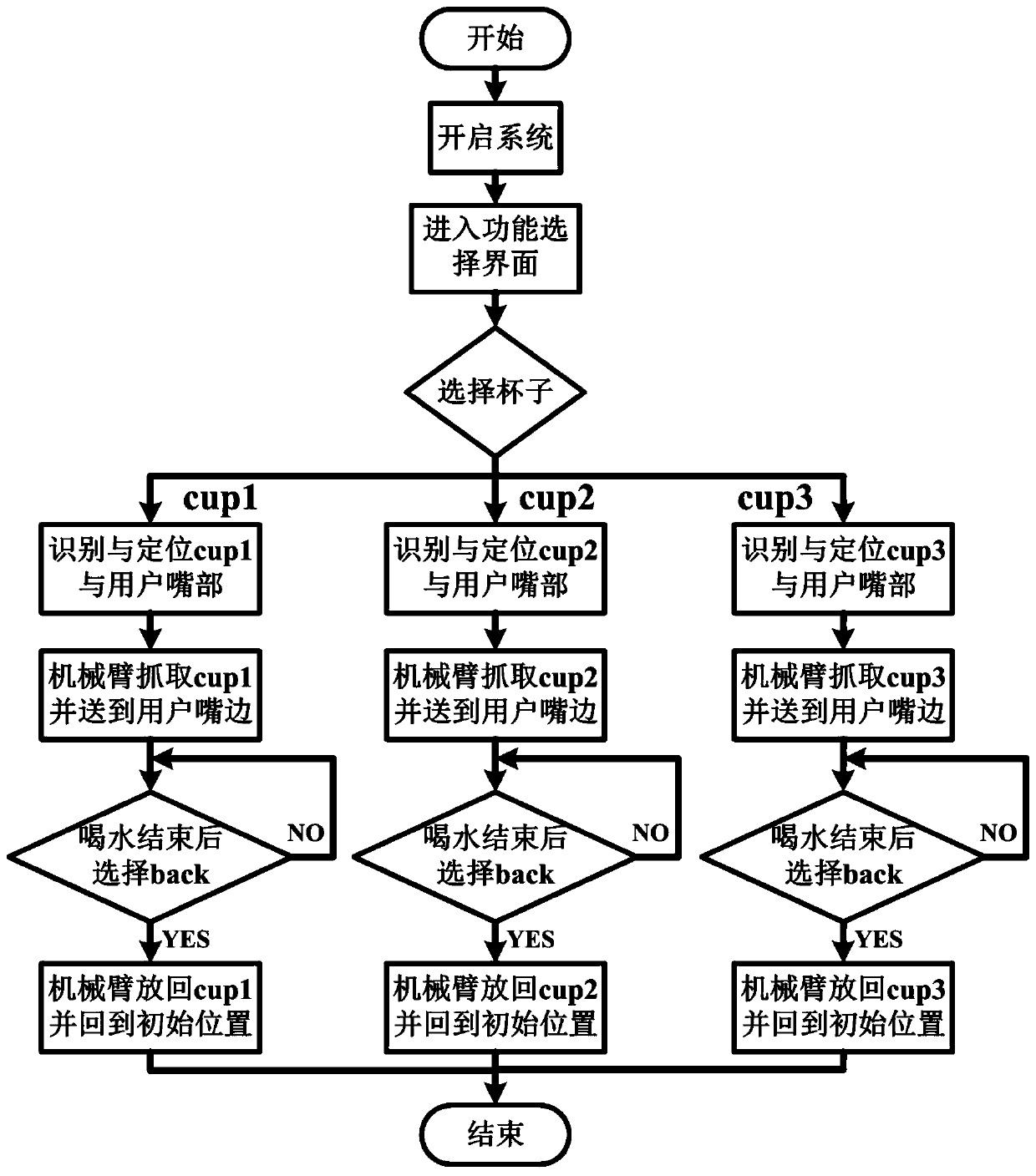
[0052] This embodiment provides a brain-computer interface-based robotic arm autonomous assistance method, such as figure 2 As shown, the method includes the following steps:
[0053] 1) The user sits in front of the first computer screen, adjusts the position, wears the electrode cap for EEG acquisition, turns on the EEG acquisition instrument and the first computer, and confirms that the signal acquisition is in good condition;
[0054] 2) Start the autonomous auxiliary system of the robotic arm based on the brain-computer interface, confirm that the Microsoft Kinect visual sensor that recognizes and locates the user's mouth can correctly capture the user's mouth, and confirm that the three preset cups to be grabbed are correctly placed Within the field of view of the Microsoft Kinect vision sensor used to identify and locate the cup to be grabbed;
[0055] 3) The first computer screen enters a flickering visually stimulating function key interface, which includes four fun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More