

Rapid indoor scene understanding method
An indoor scene and scene technology, applied in the field of indoor three-dimensional scene understanding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
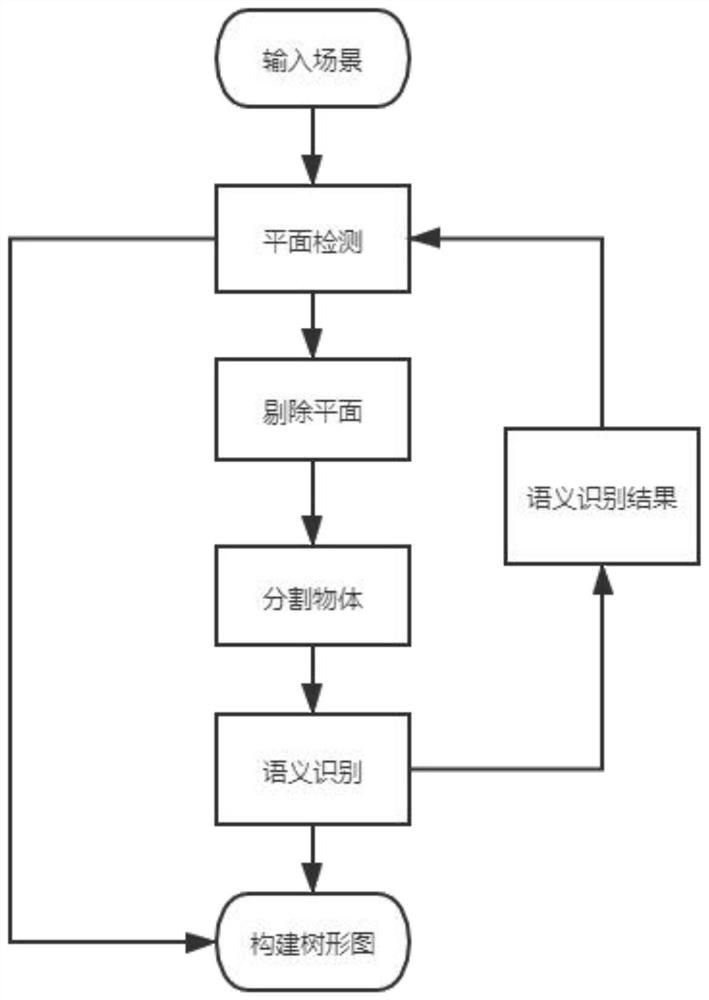
[0030] Such as figure 1 As shown, a fast indoor scene understanding method includes the following steps:
[0031] Step 1: Use the RGB-D sensor to obtain the overall 3D scanning data of the room;
[0032] Step 2: Detect the scene plane, and assign semantic information (wall, ground) to the plane;
[0033] Detecting planes from point clouds is actually a common problem in computer vision and robotics. Indoor scenes usually consist of a variable number of planes; RANSAC is run continuously to detect all planes in the scene until no more planes are found. Since the planes in the scene will include small planes such as tables, it is first necessary to obtain the plane parameters of all the detected planes, and then merge the normal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More