

A trend analysis method and system based on UAV autonomous flight situation awareness trend
A technology of situational awareness and analysis method, applied in control/adjustment system, instrument, three-dimensional position/course control, etc., can solve problems such as difficult to accurately reach the destination, poor reliability of autonomous flight, sudden obstacles, etc. Adaptability, increase processing function, optimize storage effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below through specific embodiments.
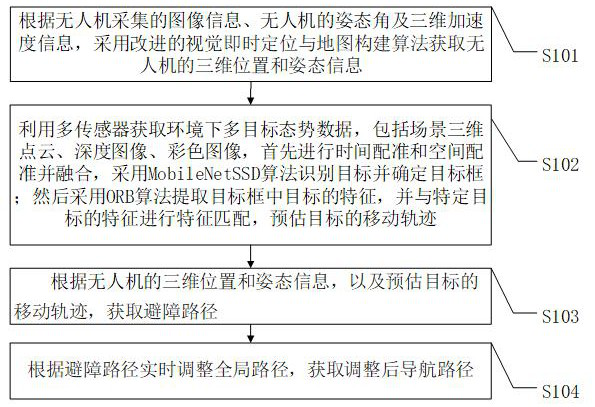
[0052]The method provided by the invention enables the UAV to obtain its own information in real time during the autonomous flight process, and can sense the environment information, realize target recognition and trajectory estimation, and then generate obstacle avoidance paths, and perform real-time adjustment of the global path , to achieve reliable autonomous flight of UAVs.
[0053] Such as figure 1 A flow chart of an analysis method based on the situational awareness trend of autonomous flight of the UAV provided in the embodiment of the present invention, specifically including the following steps:
[0054] S101: According to the image information collected by the drone, the attitude angle and the three-dimensional acceleration information of the drone, the improved visual real-time positioning and map construction algorithm is used to obtain the three-dimensional position and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More