

Passive exoskeleton robot for upper limb assistance in carrying operation
An exoskeleton robot and exoskeleton technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problem of less research on passive exoskeleton-assisted robots, and achieve the effect of increasing work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The purpose of the invention of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the embodiments cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following embodiments.
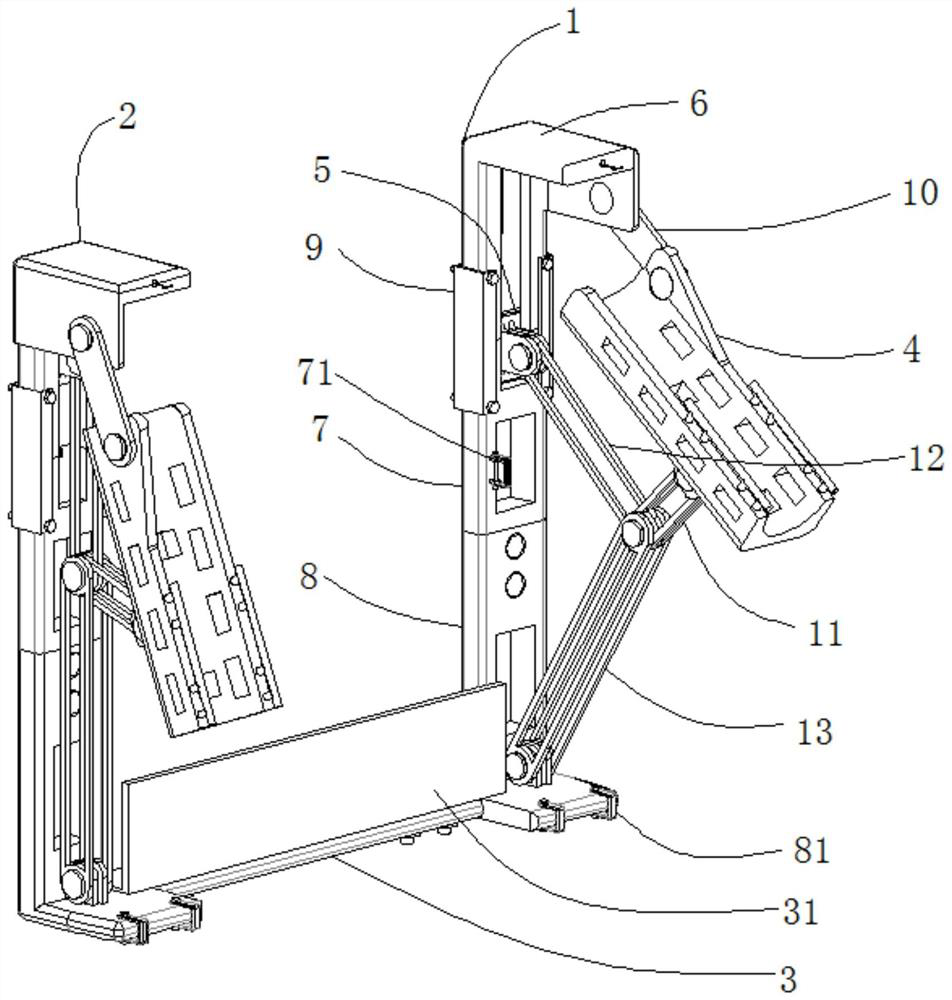
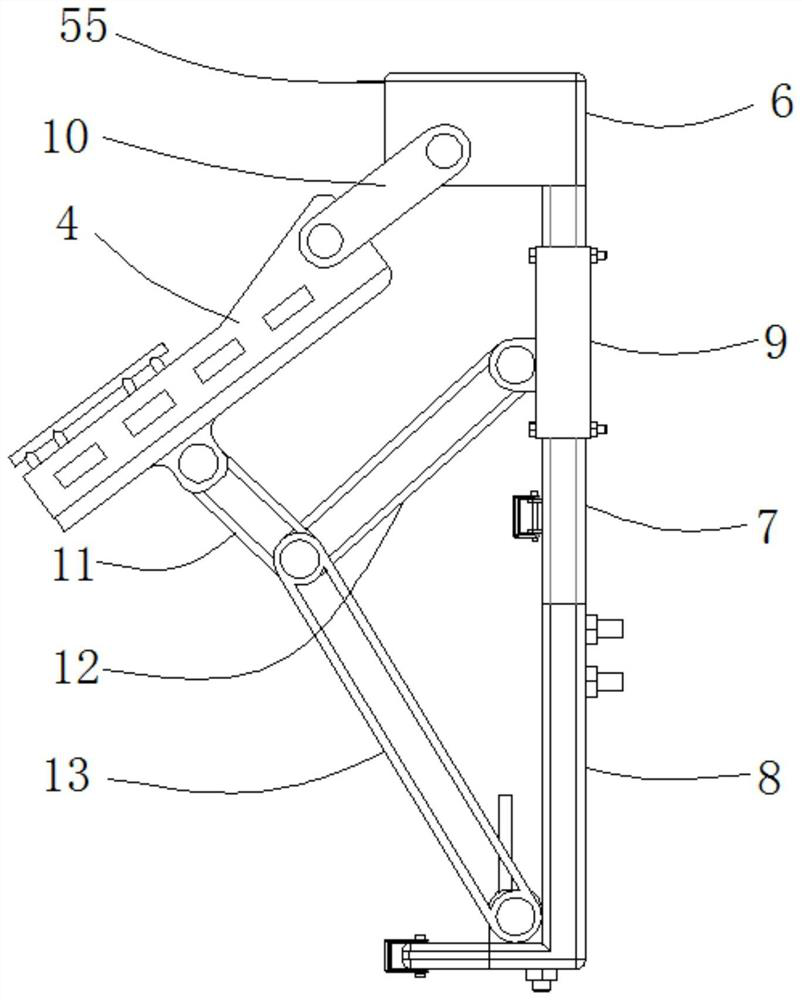
[0027] Such as Figures 1 to 4 As shown, a passive exoskeleton robot for assisting upper limbs in carrying operations, including a first back mechanism 1, a second back mechanism 2 and a connecting block 3, the first back mechanism 1 connects with the second back mechanism through the connecting block 3 Mechanisms 2 are connected, and the connecting block 3 makes the structural integrity of the first back mechanism 1 and the second back mechanism 2 better. The connecting block 3 is also provided with a back plate 31, which is used to make the wearer more comfortable to bear the exoskeleton. The pressure of the robot, the first back mechanism 1 and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More