

Bionic hexapod robot
A hexapod robot and fuselage technology, applied in the field of robotics, can solve problems such as poor walking stability, small working space of mechanical legs, and low load capacity, and achieve high carrying capacity, improved working space, and large range of motion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] In order to make the object, technical solution and advantages of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
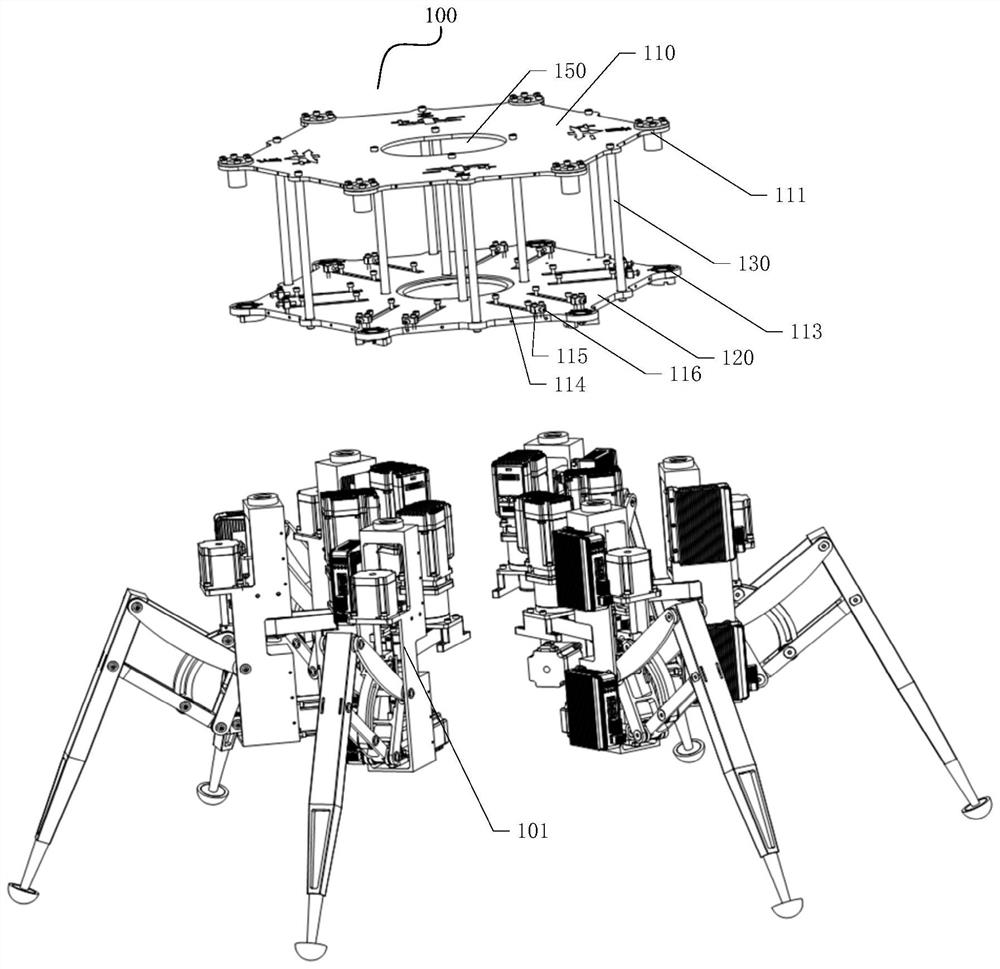
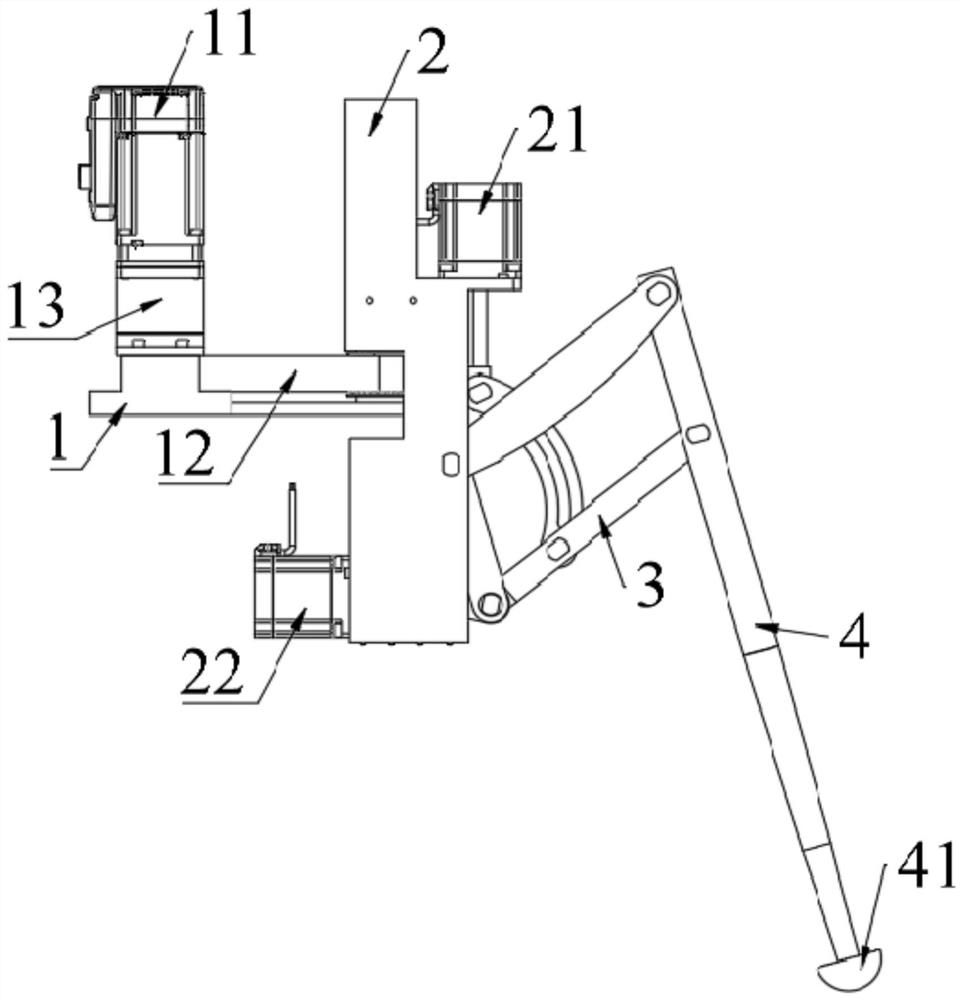
[0053] Please also see Figure 1-Figure 8 , the present invention provides some embodiments of a bionic hexapod robot.
[0054] Such as Figure 1-Figure 4 As shown, the present invention provides a bionic hexapod robot comprising a fuselage part 100 and six mechanical legs 101 evenly arranged on the fuselage part 100, the fuselage part 100 includes a top plate 110, a bottom plate 120 and a 110 and the support rod 130 between the bottom plate 120, the top plate 110 is evenly provided with six support shafts 111, and the bottom plate 120 is evenly provided with six bearings 113 correspon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More