

General avoidance method and system for singular point of mechanical arm
A technology of manipulator and singularity, applied in the field of general avoidance method and system of manipulator singularity, can solve the problems of high computational cost, complex Jacobian matrix, singularity analysis and avoidance difficulty, etc., and achieves the effect of low computational cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
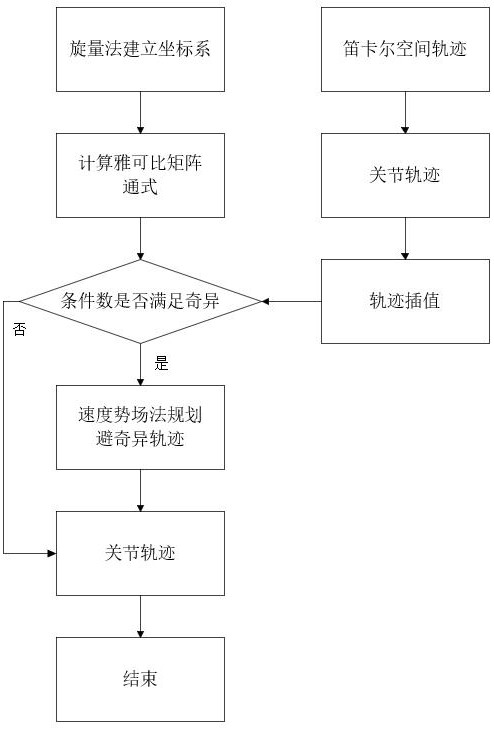
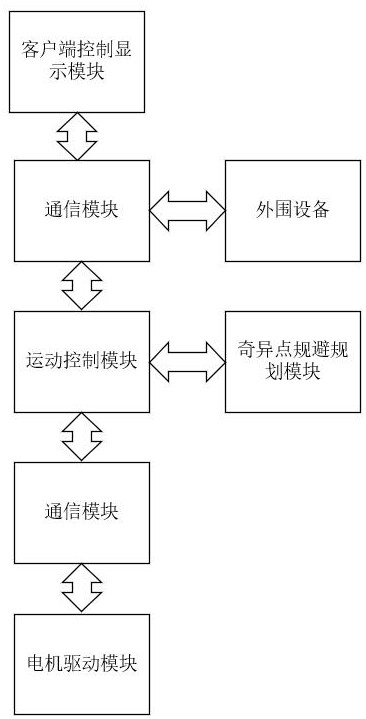
[0049] Such as figure 1 and figure 2 As shown, the present invention provides a general-purpose manipulator singularity avoidance method and system that has high reliability, does not need to calculate the specific position of the singularity in advance, simplifies the singularity analysis process, and is suitable for most manipulators.
[0050] The method for avoiding the singular point of the universal mechanical arm of the present invention adopts the following technical scheme:
[0051] First establish the kinematics model of the manipulator, establish the reference joint coordinate system, use the screw theory to calculate the screw of each joint, and solve the Jacobian matrix;
[0052] Calculate the condition number of the Jacobian matrix according to the Jacobian matrix, and use the condition number to judge whether it is close to the singular point. When the condition number decreases and approaches the safety threshold, it is considered that the manipulator is about...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More