

Compliant force control method and system for collaborative robot
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of difficulty in obtaining the expected trajectory of the robot, difficulty in ensuring the accuracy of robot force control, and difficulty in dealing with system constraints, so as to improve stiffness and meet joint angles, the effect of reducing flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
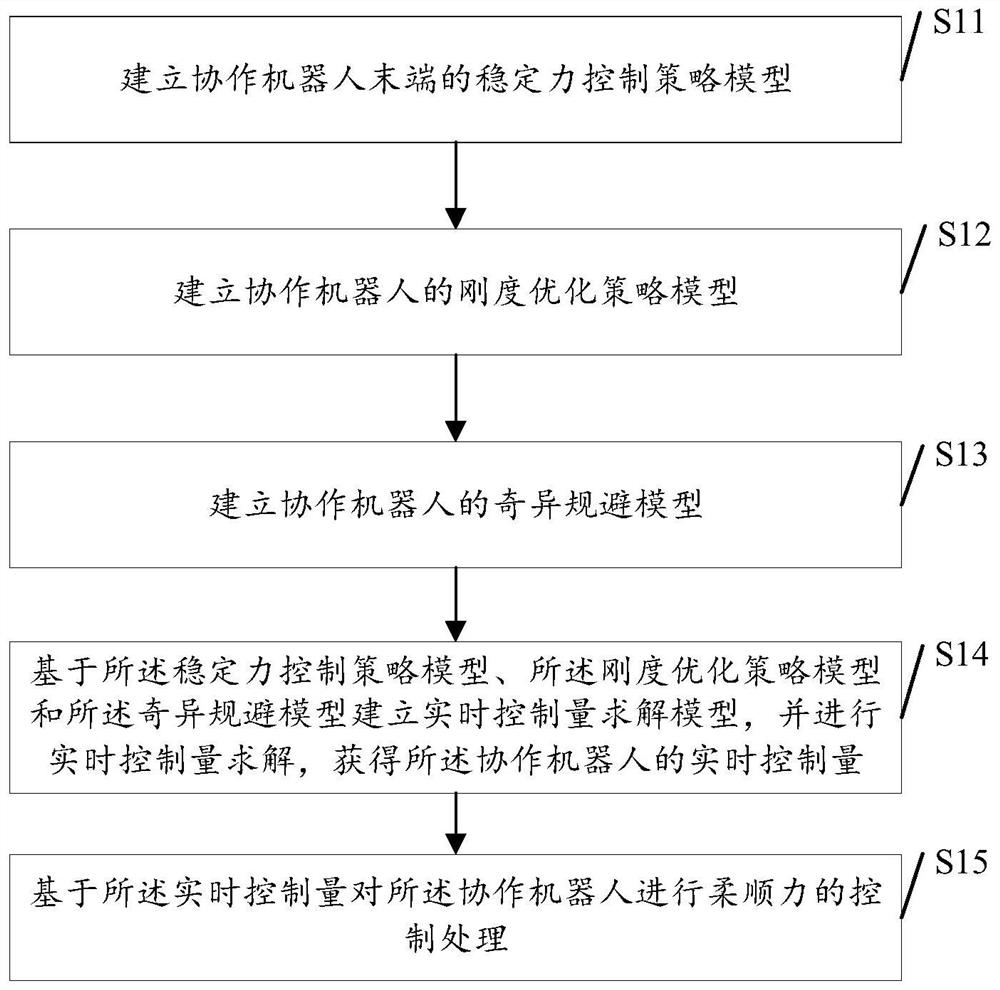
[0067] see figure 1 , figure 1 is a schematic flow chart of the compliance force control method of the collaborative robot in the embodiment of the present invention.
[0068] Such as figure 1 Shown, a kind of compliant force control method of collaborative robot, described method comprises:
[0069] S11: Establish a stabilization force control strategy model at the end of the collaborative robot;
[0070] In the specific implementation process of the present invention, the establishment of the stability control strategy model of the end of the collaborative robot includes: using the principle of group pit control to establish the relationship between the relative motion of the end of the collaborative robot and the contact force; The relationship between contact force and contact force establishes a stable force control strategy model at the end of the collaborative robot.
[0071] Further, the relationship between the relative movement of the ends and the contact force i...
Embodiment 2
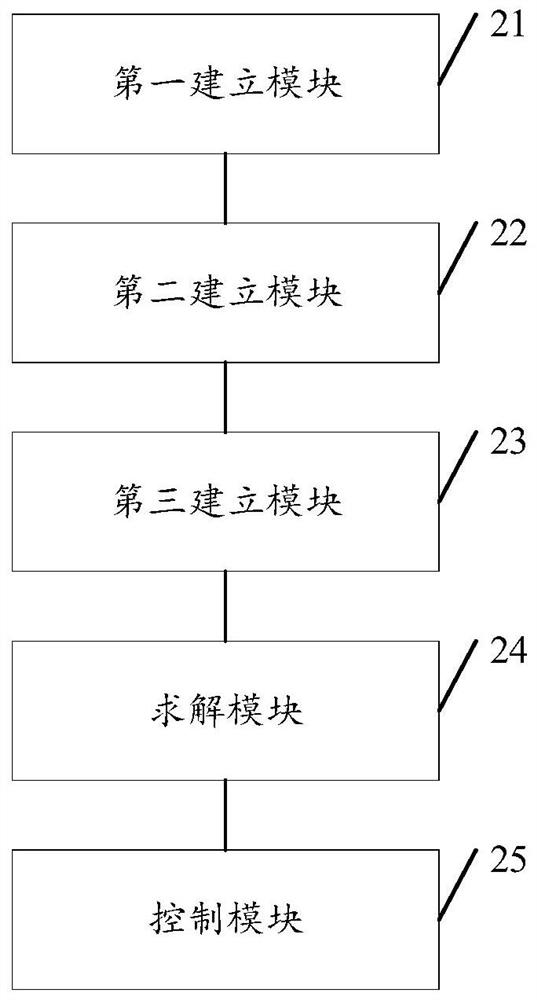
[0162] see figure 2 , figure 2 is a schematic diagram of the structural composition of the compliance force control system of the collaborative robot in the embodiment of the present invention.
[0163] Such as figure 2 Shown, a kind of compliant force control system of collaborative robot, described system comprises:
[0164] The first establishment module 21: used to establish the stability control strategy model of the end of the collaborative robot;
[0165] In the specific implementation process of the present invention, the establishment of the stability control strategy model of the end of the collaborative robot includes: using the principle of group pit control to establish the relationship between the relative motion of the end of the collaborative robot and the contact force; The relationship between contact force and contact force establishes a stable force control strategy model at the end of the collaborative robot.
[0166] Further, the relationship betwe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More