

Part grabbing device for automatic production workshop
A technology for grabbing devices and production workshops, which is applied to conveyor objects, transportation and packaging, and metal processing. It can solve the problems of heavy labor burden, low work efficiency, and inability to protect parts, so as to reduce the labor burden of workers and improve Production quality, improve assembly efficiency low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
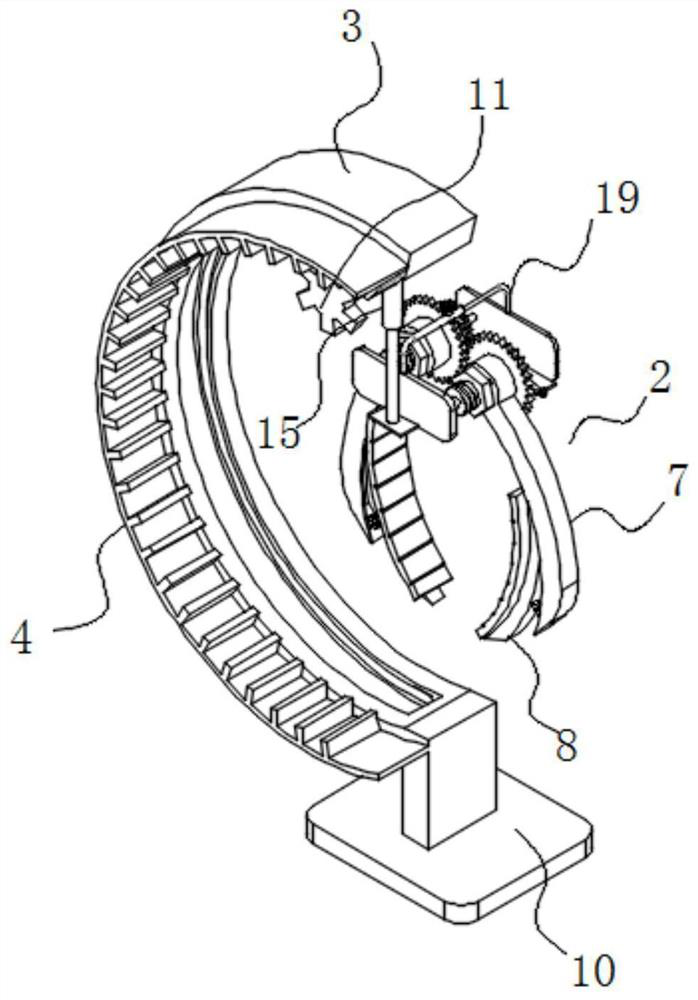
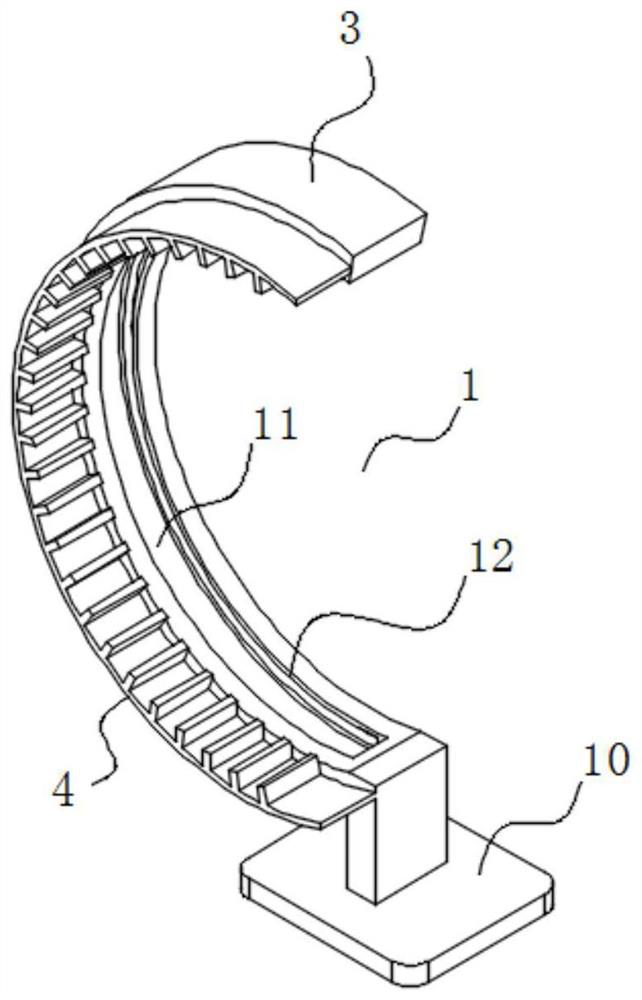
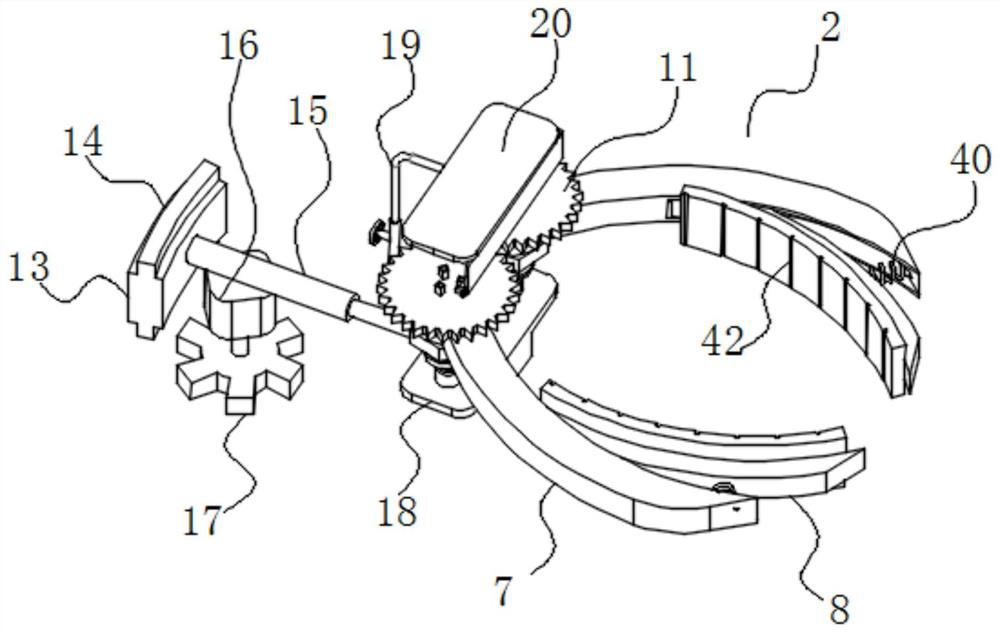
[0027] see Figure 1-8 Description of this embodiment, a parts grabbing device for an automated production workshop, which includes a support frame 1 and a grabbing assembly 2, the grabbing assembly 2 is connected to the support frame 1 by sliding fit, the support frame 1 includes an arc-shaped connecting plate 3, and the arc The side of the shaped connecting plate 3 is fixedly connected with an arc-shaped gear bar 4, and the grasping assembly 2 includes a sliding frame 5, a rotating part 6, a first claw 7 and a second claw 8, and one end of the rotating part 6 is connected to the sliding frame 5 in rotation. , the other end of the rotating part 6 is engaged and connected with the sliding frame 5, the first claw 7 is connected with the rotating part 6, the first claw 7 is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More