Guide wire/catheter conveying device of vascular intervention surgical robot and vascular intervention surgical robot
A technology of interventional surgery and delivery device, which is applied in the field of medical devices, can solve the problems of large physical injury, long time, and increased potential risks of surgery, and achieve the effect of ensuring stable output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
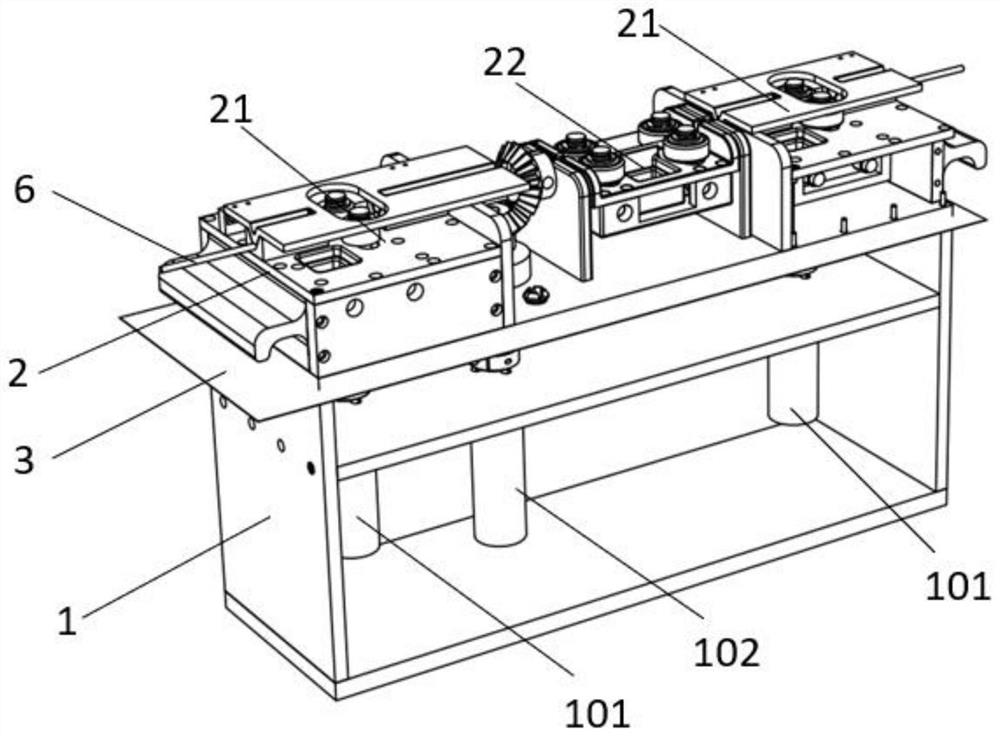
[0055] see Figure 1-4 , a guidewire / catheter delivery device for a vascular interventional robot, if in this embodiment it is mainly used to deliver guidewires, it includes:
[0056] The driving part 1 includes a first driving unit 101 and a second driving unit 102;
[0057] At least one set of advancing and retreating wire modules 21, the first driving unit 101 is used to drive the advancing and retreating wire modules 21, so as to realize the movement of the guide wire 6 along its axial direction;
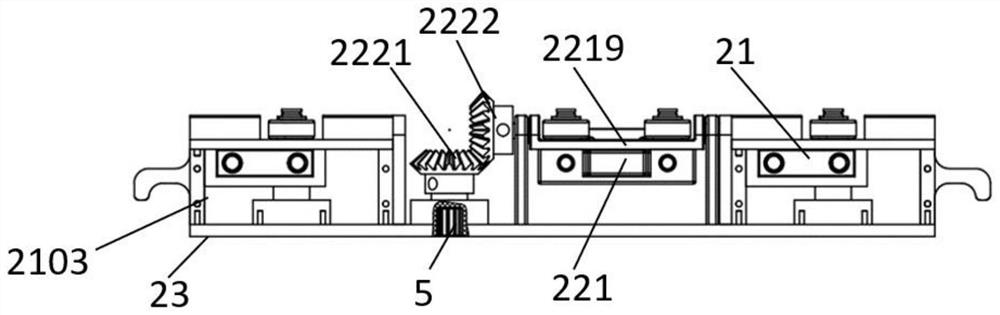
[0058] The wire rotation module 22 further includes a clamping assembly 221, the clamping assembly 221 is used to clamp the guide wire 6, the second driving unit 102 is connected to the clamping assembly 221, and is used to drive the clamping assembly 221 to rotate along the axis of the guide wire 6 , and then drive the guide wire 6 to rotate;
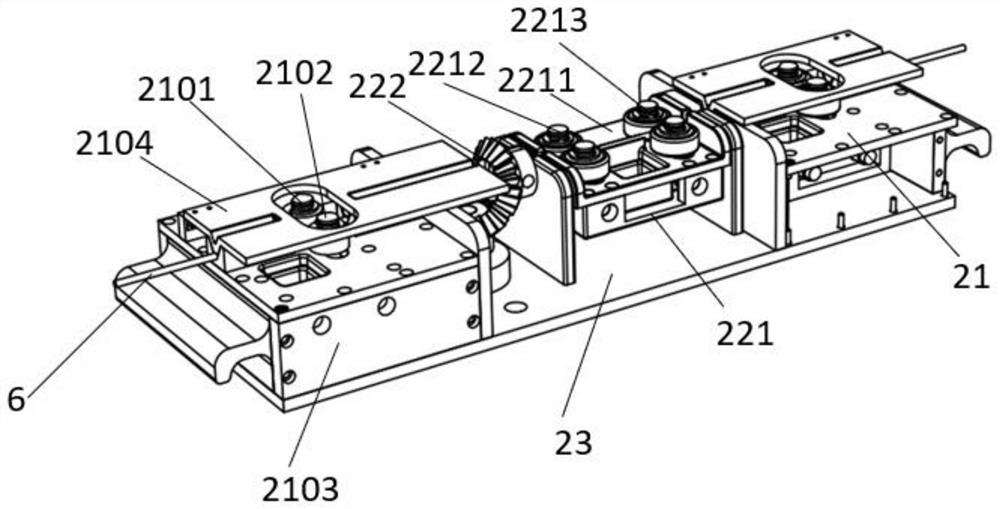
[0059] In this embodiment, two groups of advancing and retreating wire modules 21 are included. Along the axis direction of the guide...
Embodiment approach
[0070] In a preferred embodiment, the first pressing wheel adjustment assembly includes a first sliding member 2214 and a first locking member. The first sliding member 2214 is slidably arranged on the clamping seat 2211. The first sliding member 2214 and the first pressing wheel The axle of 2213 is fixedly connected;
[0071] Push the first sliding member 2214, and the first sliding member 2214 slides along the straight line where the axis of the first pressing wheel 2213 and the axis of the fixed wheel 2212 are located, so as to adjust the axial distance between the first pressing wheel 2213 and the fixing wheel 2212 ;
[0072] The first locking part is connected with the first sliding part 2214, and is used for locking the state where the first sliding part 2214 slides to the target position.
[0073] There are many implementations of the first pressure wheel adjustment assembly, such as screw nuts, slide rail sliders, etc., using motor control to lock the slider or nut to...
Embodiment 2
[0098] The present invention also provides a vascular interventional surgery robot, including the guide wire delivery device of the vascular interventional surgery robot in the above embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com