

Improved control method for movement speed of six-axis mechanical arm
A six-axis robotic arm and motion speed technology, applied in the field of robotics, can solve problems affecting control accuracy, speed discontinuity, speed change delay, etc., to achieve the effects of stable algorithm, improved control accuracy, and reduced jitter phenomenon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
[0083] An embodiment of the present invention provides an improved method for controlling the movement speed of a six-axis mechanical arm.
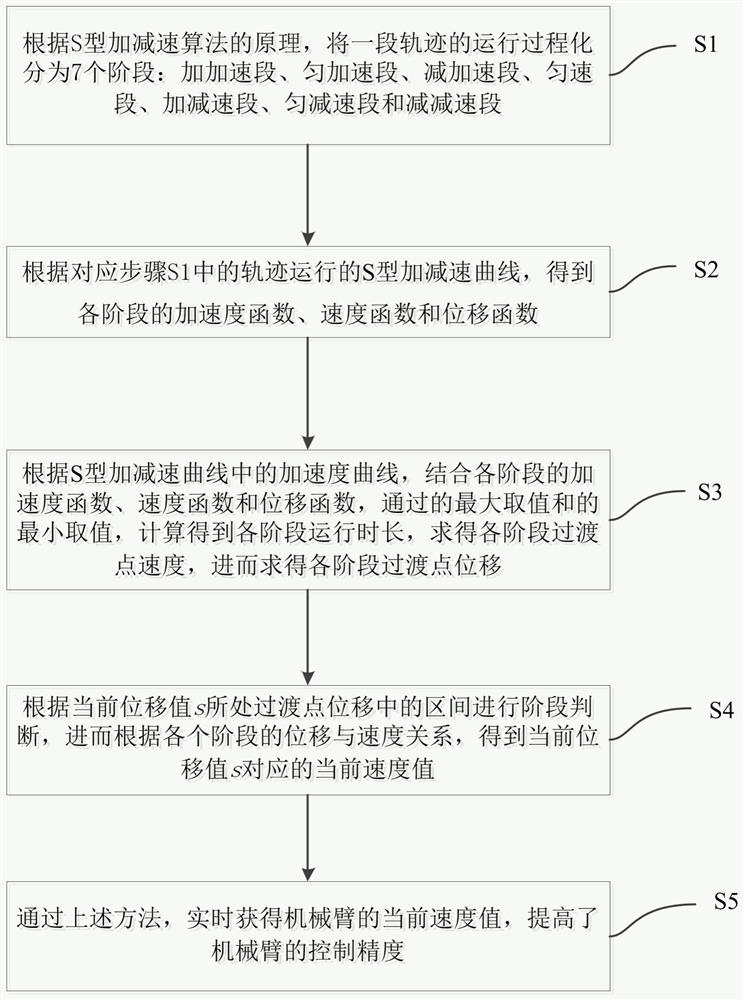
[0084] Please refer to figure 1 , figure 1 It is a flow chart of a method for improving the movement speed control of a six-axis mechanical arm in an embodiment of the present invention, and the specific steps are as follows:
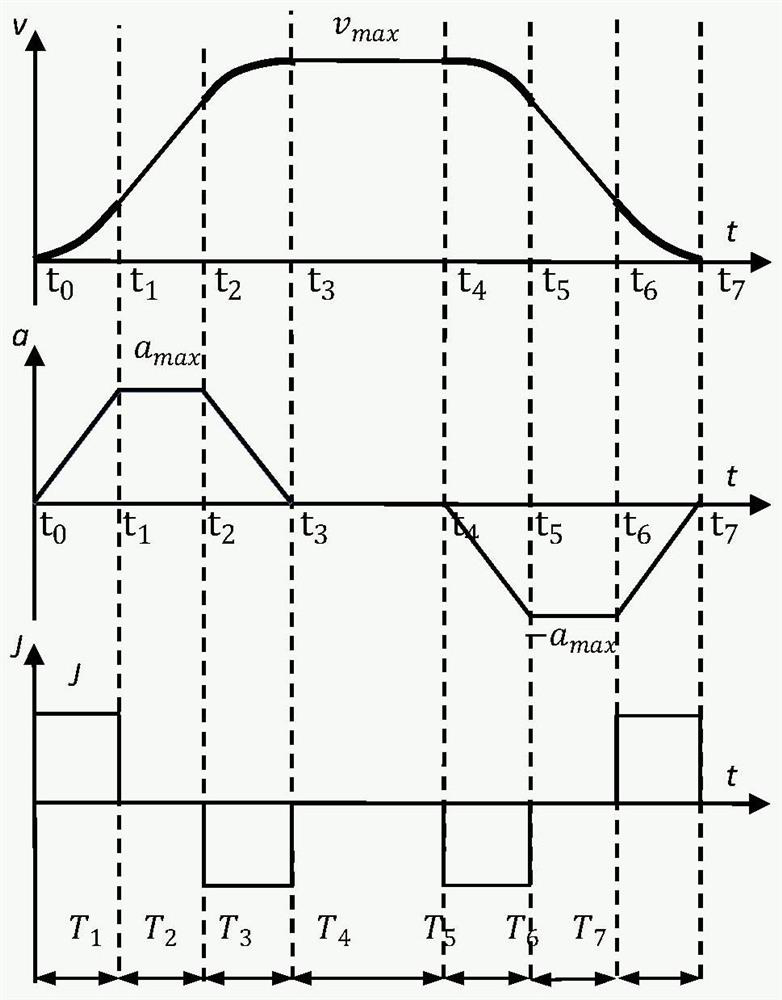
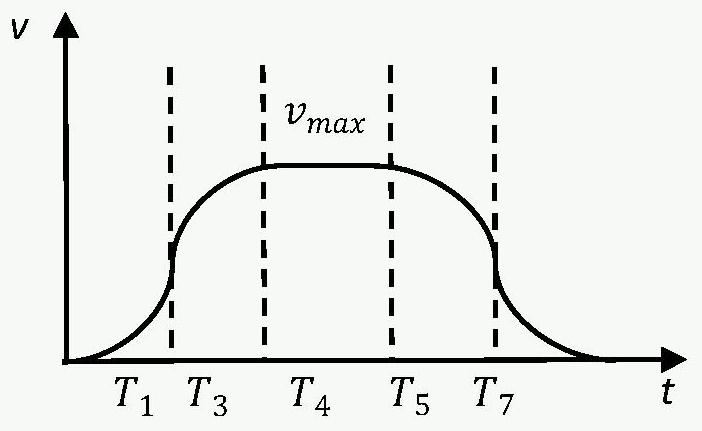
[0085] S1: According to the principle of S-type acceleration and deceleration algorithm, the operation process of a trajectory is divided into 7 stages: acceleration and acceleration segment, uniform acceleration segment, deceleration acceleration segment, uniform speed segment, acceleration and deceleration segment, uniform deceleration segment and deceler...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More