

Robot network switching method and device and storage medium
A robot network and robot technology, applied in location information-based services, electrical components, wireless communications, etc., can solve problems such as inability to synchronize mobile information of users, inability to switch networks in time, and lack of automatic network switching, etc., to reduce computing load Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
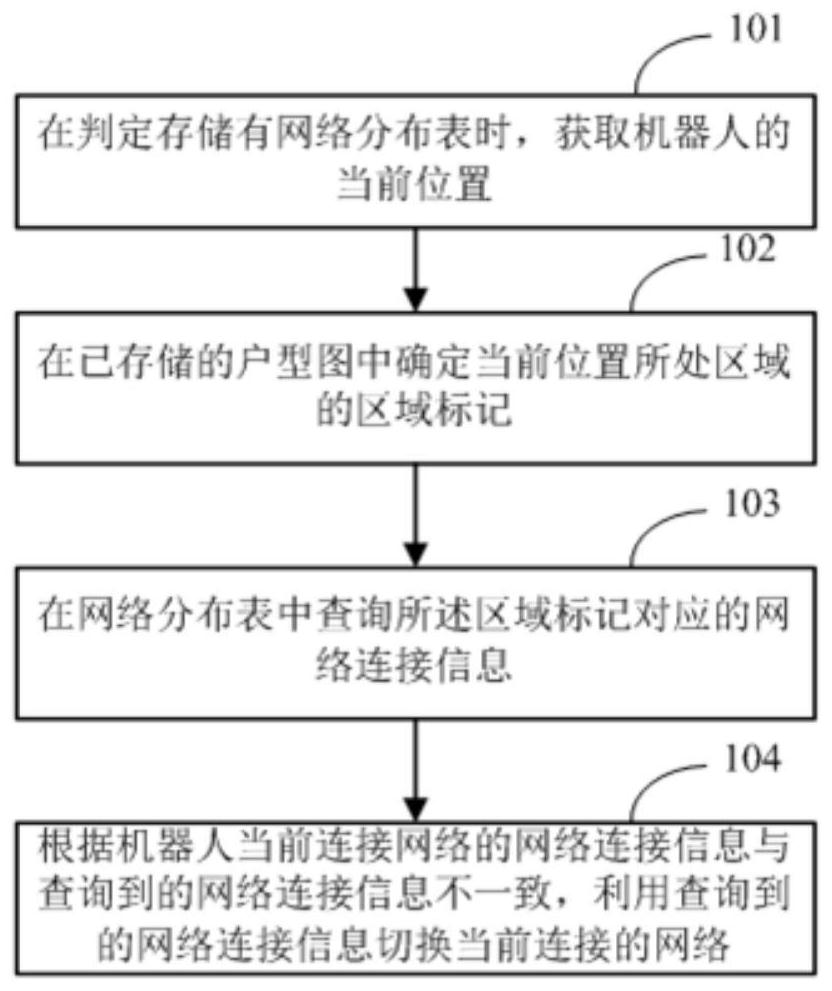
[0063] Figure 1A It is a schematic flow chart of an embodiment of a robot network switching method according to an exemplary embodiment of the present invention. During the movement of the robot in each area of a large building, since different WIFI hotspots are set in each area, the robot needs to have Network switching capability, the following takes the robot as an example to illustrate the sweeping robot, such as Figure 1A As shown, the robot network switching method includes the following steps:
[0064] Step 101: Acquire the current position of the robot when it is determined that the network distribution table is stored.
[0065] Among them, the network distribution table refers to the table generated according to the obtained floor plan and network coverage area map after the cleaning of the whole house, so as to facilitate the subsequent direct table lookup for network switching, without the need to continuously and periodically scan each network signal for network...
Embodiment 2
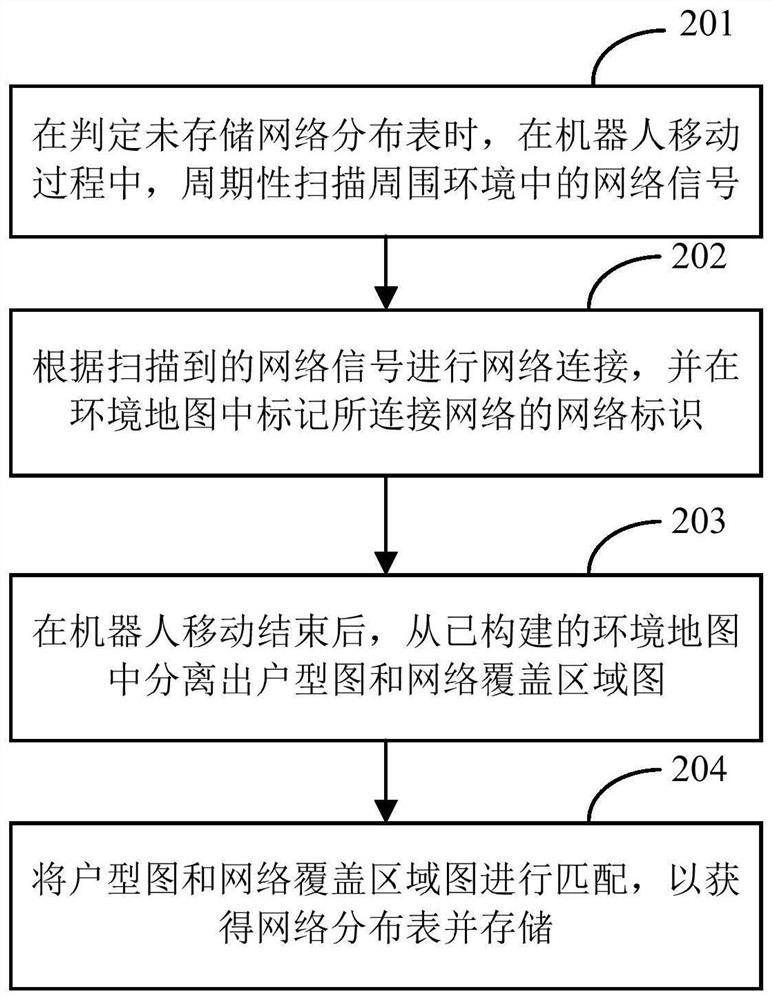
[0083] Figure 2A It is a schematic flow chart showing the establishment of a floor plan and network distribution table according to an exemplary embodiment of the present invention, based on the above Figure 1A On the basis of the illustrated embodiment, the process of establishing the house type diagram and the network distribution table includes the following steps:
[0084] Step 201: When it is determined that the network distribution table is not stored, periodically scan the network signals in the surrounding environment during the movement of the robot.
[0085] Among them, if the robot does not store the network distribution table, it means that the table cannot be directly checked for network switching at present, and the whole house cleaning mode is required to establish the floor plan and network distribution table of the whole house, and in the whole house cleaning mode, periodic cleaning is required. Scan the network signal in the surrounding environment so that ...
Embodiment 3
[0099] image 3 for the present invention according to Figure 2A The illustrated embodiment shows a schematic diagram of a matching process between a floor plan and a network coverage area map, based on the above Figure 2A On the basis of the illustrated embodiment, the process of matching the house type map with the network coverage area map includes the following steps:
[0100] Step 301: For each area in the floor plan, obtain the distance between the center point of the area and the center points of each network coverage area included in the network coverage area map.
[0101] Step 302: Select the network connection information corresponding to the network coverage area with the shortest distance.
[0102] Step 303: Correspondingly adding the selected network connection information and the area label of the area to the network distribution table.
[0103] So far, complete the above image 3 The matching process shown is simple to implement by calculating the distance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More