

Unmanned aerial vehicle obstacle avoidance method and system based on speed potential field
A technology of unmanned aerial vehicle and velocity potential, applied in control/regulation system, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problem of inability to deal with real-time, high-speed moving obstacles, etc. reach, reduce flight costs, and achieve the effect of an effective track path
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] The technical solutions in the embodiments of the present invention will be clearly and completely described below, obviously, the described embodiments are only some of the embodiments of the present invention, not all of the embodiments. All other embodiments obtained by persons of ordinary skill in the art based on the embodiments of the present invention belong to the protection scope of the present invention.
[0094] exemplary method
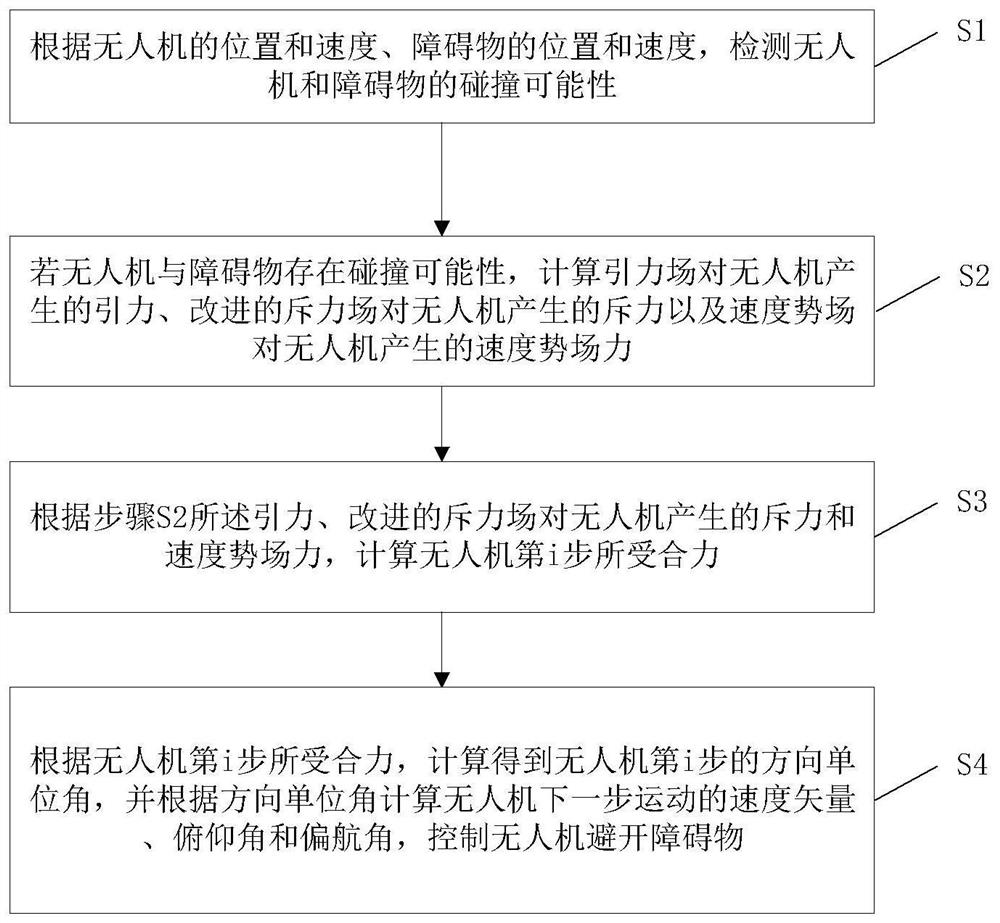
[0095] figure 1 It is a schematic flow diagram of a UAV obstacle avoidance method based on a velocity potential field provided according to some embodiments of the present application; figure 1 As shown, the UAV obstacle avoidance method includes:
[0096] Step S1, according to the position and speed of the drone and the position and speed of the obstacle, detect the possibility of collision between the drone and the obstacle;
[0097] According to the position and speed of the UAV and the position and speed of the obstacle, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More