

Intelligent clamping and laying equipment for practical training of students
A practical and intelligent technology, applied in the field of plastering, can solve problems such as waste of raw materials, waste of materials, and mechanical failure of dirty equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
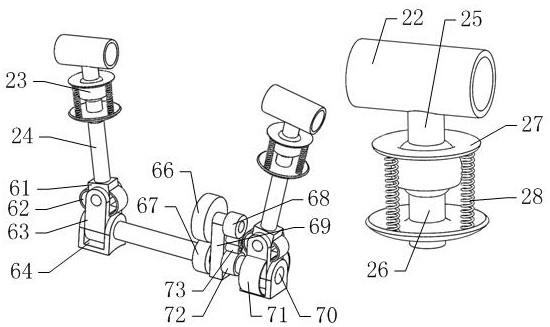
[0082]Implementation mode: when using the equipment designed in the present invention to scrape walls, control the second motor 75 to work, the second motor 75 will drive the sixth gear 76 to rotate, the sixth gear 76 will drive the seventh gear 77 to rotate, the seventh The rotation of the gear 77 drives the rotation of the installation rod 79, and the rotation of the installation rod 79 drives the rotation of the rotating shell 74. At the same time, the rotation of the installation rod 79 drives the rotation of the fixed rod 83 installed on it, and then drives the rotation of the second steady flow shell 84 thereon; through the rotation of the rotation shell 74 The rotation can stir the air bubbles in the paint entering the rotating shell 74 to reduce the distribution of the air bubbles; at the same time, the second steady flow shell 84 installed on the mounting rod 79 can absorb the air bubbles in the paint.
[0083] Then the paint is sprayed into a part of the wall through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More