

Method for controlling six-axis mechanical arm to pass through singular point
A six-axis manipulator and control method technology, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as narrow application range, increased planning calculation amount, and inability to find inverse solutions, achieving wide application range and control The effect of convenience and small amount of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the examples and drawings, but the embodiments of the present invention are not limited thereto.
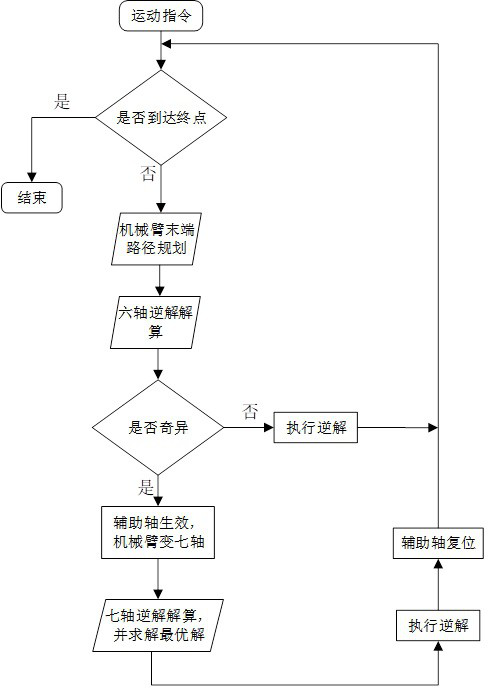
[0033] see Figure 1-Figure 3 , the method for controlling the six-axis robotic arm passing through the singularity of the present embodiment includes the following steps:
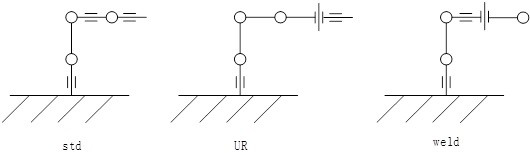
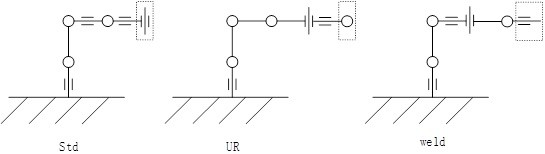
[0034] (1) Add an auxiliary axis to the last axis arm of the six-axis robot arm; under normal conditions, the auxiliary axis and the last axis arm of the six-axis robot arm form a whole to move; the normal state here refers to the conventional In the working state, that is, when the six-axis robotic arm does not encounter a singular point during the motion. According to different working spaces, loads and planned trajectories, six-axis manipulators are divided into different configurations. The commonly used configurations are std type, UR type and weld type, such as figure 2 shown; of course, there are various other less comm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More