

Point cloud 3D target detection method based on key point multi-scale feature fusion
A multi-scale feature, target detection technology, applied in the field of 3D target detection, can solve the problems of ignoring mutual relationship, ignoring detection accuracy, ignoring the distinction between foreground point and background point information, etc., to achieve the effect of reducing the impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Next, the technical solutions in the embodiments of the present invention will be described in connection with the drawings of the embodiments of the present invention, and it is understood that the described embodiments are merely the embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art are in the range of the present invention without making creative labor premise.
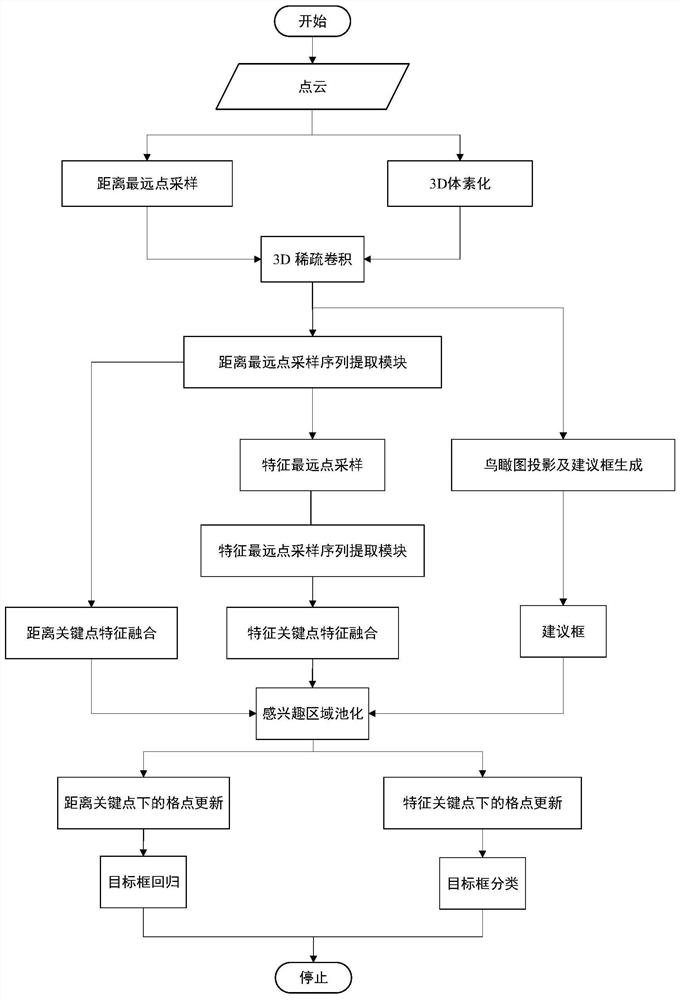
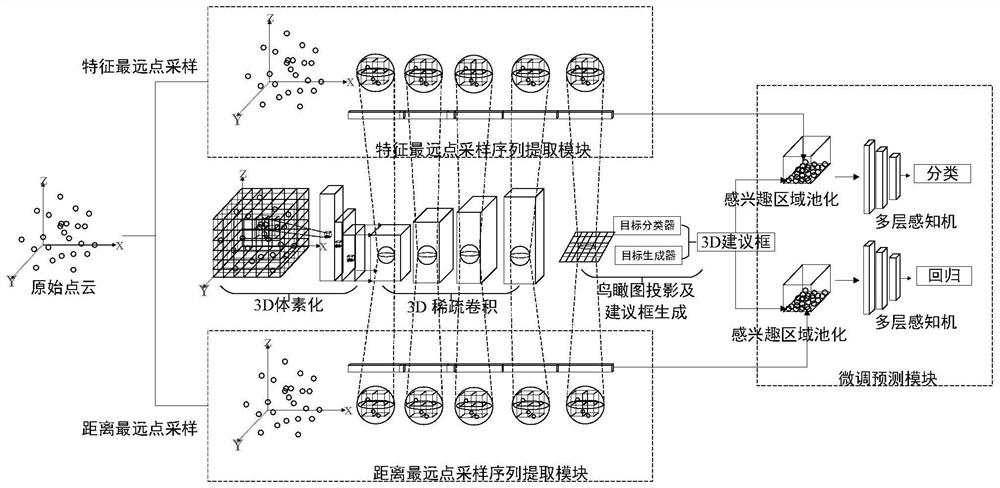
[0051] In the field of point cloud target detection, a point cloud scene contains tens of thousands of points, direct use of all points to predict and regression will cause huge resources and time waste. In most target detection algorithms, iterations generates a key point using the POINTNET ++ Distance Distance Sample (FPS), which generates a feature vector using a key point with the adjacency of the surrounding point. However, according to the point sample, the point is includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More