

Improved feature extraction method and image splicing method based on same
A technology of feature extraction and image stitching, applied in image enhancement, image analysis, image data processing, etc., can solve the problems of relatively high image overlap and size requirements, unsuitable for UAV image stitching, and high algorithm complexity. Ensure the accuracy of image stitching, reduce the time required for stitching, and achieve low computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0054] Example 1: An improved region-based feature extraction method
[0055] There are many ways to achieve image stitching, and the specific details of different algorithms are different to some extent, but the implementation steps involved are roughly the same. In general, image stitching mainly follows the figure 1 The process shown proceeds.
[0056] The general steps of image stitching are as follows:
[0057] (1) Feature extraction
[0058] By analyzing the image and finding the solution that satisfies the corresponding extremum conditions, the position coordinates of the feature points in the image are obtained. At the same time, in order to describe the feature point, the corresponding feature descriptor is constructed as the description vector of the feature point. For the needs of subsequent related work, the extracted features must remain unchanged under the conditions of uneven illumination, image translation, rotation and scaling. At present, the feature dete...
Embodiment 2
[0108] Embodiment 2: An image mosaic method based on the feature extraction method described in Embodiment 1
[0109] (1) Image preprocessing
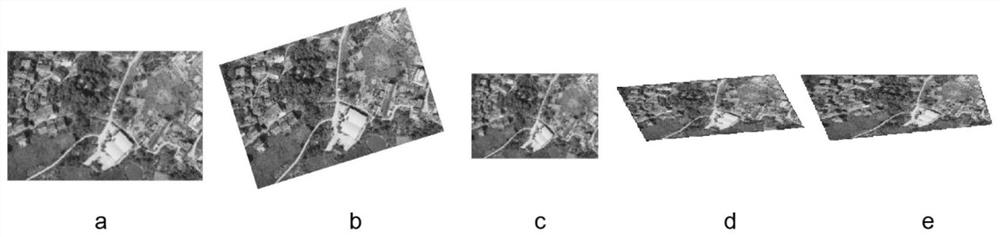
[0110] Input the image to be spliced I A , I B , respectively for I A , I B Perform image rotation, image enhancement, and smoothing preprocessing.
[0111] (2) ORB feature extraction
[0112] Obtain binary feature strings according to the feature extraction method described in Embodiment 1.
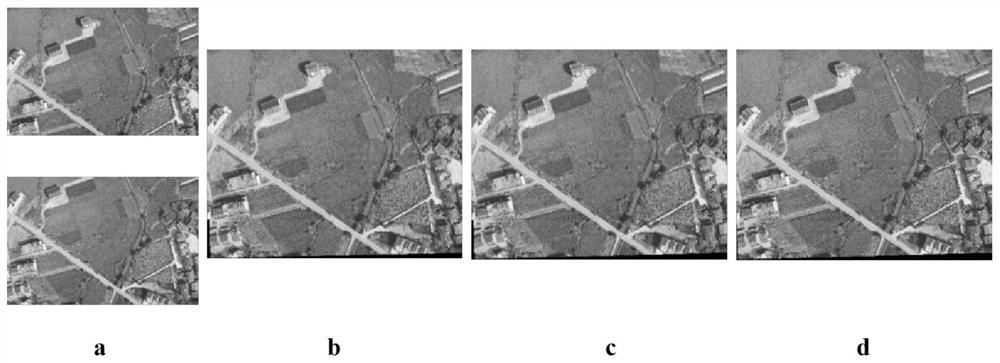
[0113] (3) Eliminate mismatches
[0114] Obtain feature point pairs through the k-nearest neighbor algorithm, and then filter I through the random consistent sampling algorithm (RANSAC) A and I B The feature points to be matched are used to eliminate a large number of false matches; at the same time, the Euclidean distance between feature descriptors is used as the main reference for feature registration, and the feature points with better matching effect are selected by setting the threshold t. For the image to be stitched For each fe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More