Method for controlling grasping force of myoelectric prosthesis
A prosthetic and myoelectric technology, applied in the field of prosthetics, can solve the problems of poor recognition accuracy, less information obtained, and inconvenient use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
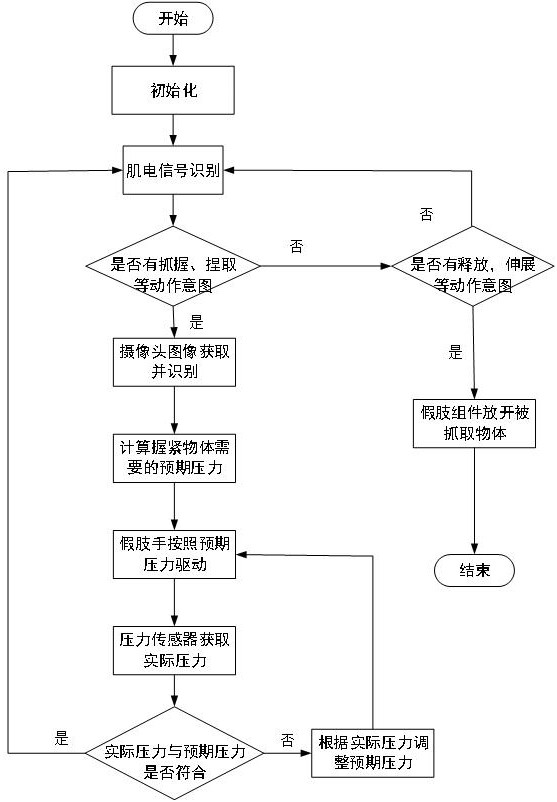
[0007] Such as figure 1 As shown, after wearing the prosthetic system, the user needs to manually turn on the switch to power on and initialize the prosthetic system. The prosthetic system will collect myoelectric signals through the control center, and classify and recognize the myoelectric signals through the pre-trained recognition model to judge the user's action intention. Here, the myoelectric signal is collected by the myoelectric sensor, the analog signal is converted into a digital signal through the PCF8591 chip, and the data is sent to the K210 processor (neural network processor) in the control center using the I2C bus.
[0008] The recognition model here is obtained by training the training samples using a Support Vector Machine (SVM). Each action needs to collect 30 sets of data, each set of data has 1000 original EMG signal eigenvalues, and the training set and test set are divided according to 6:4. Normalize the training set to the [-1, 1] interval according ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More