Backstepping self-adaptive fault-tolerant control method for fixed-wing unmanned aerial vehicle under actuator fault
A fault-tolerant control, fixed-wing technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as reduced execution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
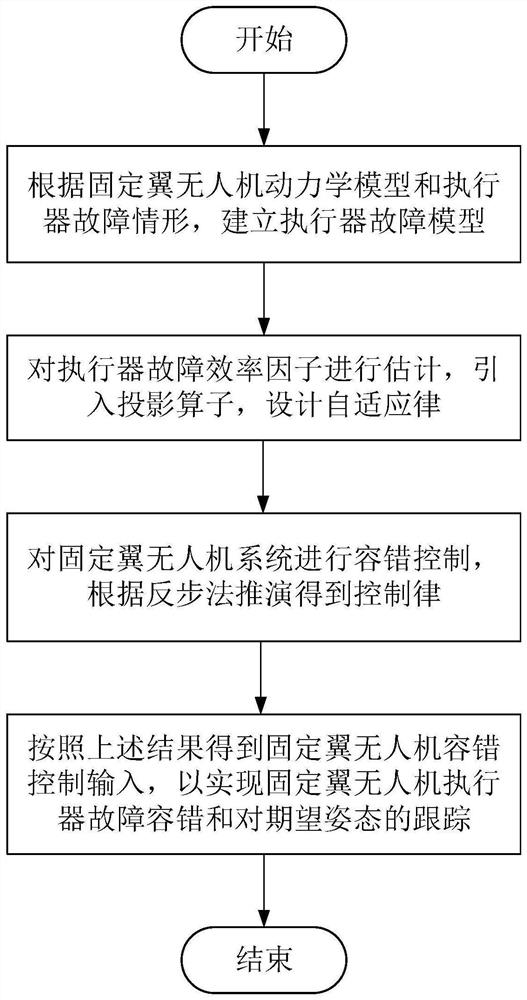
[0057] The control method of the present invention will be further explained in conjunction with the accompanying drawings.
[0058] (a) Establish the dynamic model of fixed-wing UAV:
[0059]
[0060]
[0061]
[0062] The model consists of nine state variables X = [V, χ, γ, μ, α, β, p, q, r] T and three control inputs u=[δ a ,δ e ,δ r ]T; among them, V represents velocity, χ represents heading angle, γ represents track angle; μ represents tilt angle, α represents angle of attack, β represents sideslip angle; Body axis pitch rate, body axis yaw rate; T is thrust, D is drag, L is lift, Y is lateral force; is the rolling moment, is the pitching moment, is the yaw moment; the moment of inertia component c i It is defined as follows:
[0063]
[0064] where I x , I y , I z , I xz Respectively represent rolling inertia, pitching inertia, yaw inertia and product of inertia. Forces and aerodynamic moments are defined as follows:
[0065]
[0066] Amon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More