Operating method and self-moving equipment
A self-moving and equipment technology, applied in the fields of motor vehicles, non-electric variable control, instruments, etc., can solve the problems that the machine cannot retreat from the carpet, affect the cleaning experience, low operation efficiency, etc., to improve the intelligence and use experience. , The effect of improving the performance of edge operations and reducing the probability of mistakenly entering a specific area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
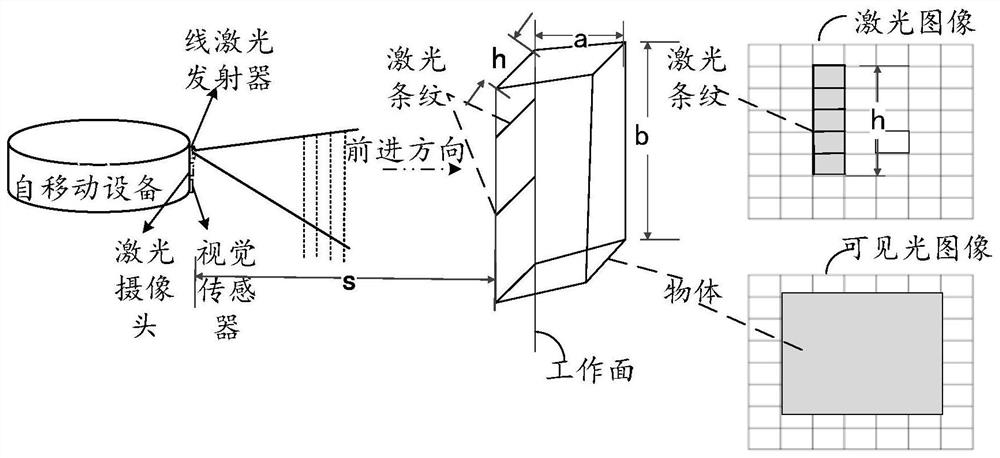
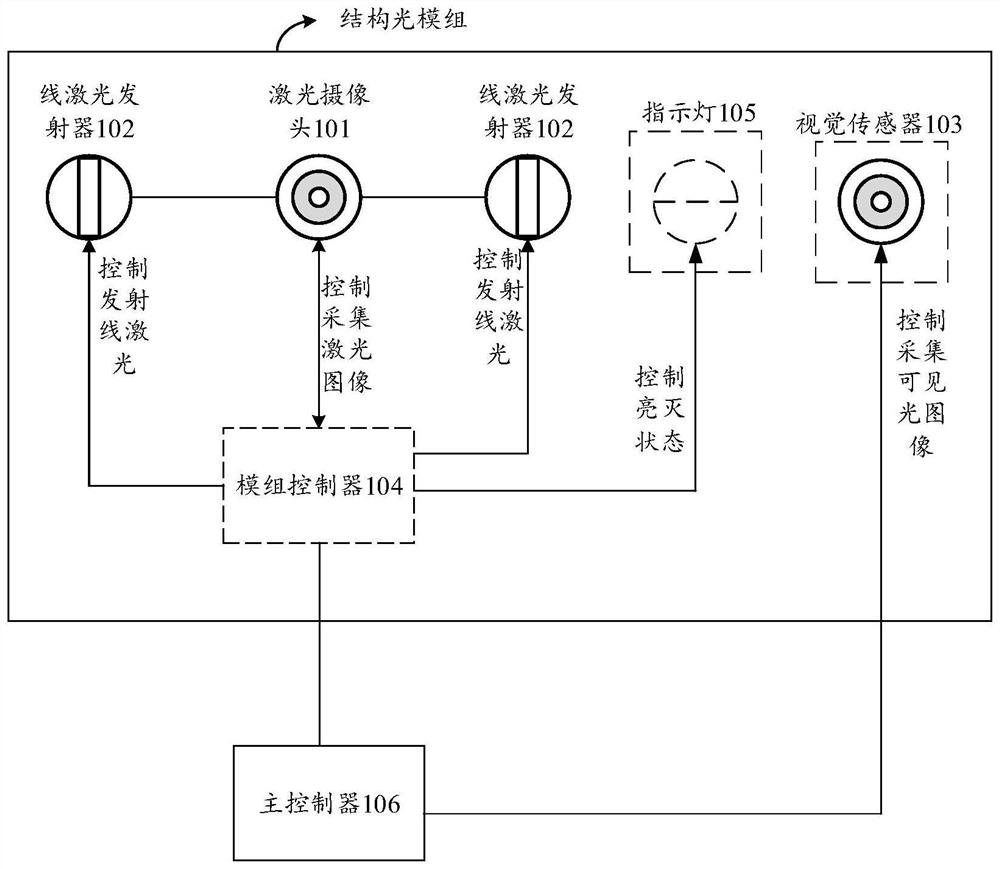
[0108] Home service robots mainly work in the home environment. Such as Figure 9 As shown, it is a more common floor plan in real life. The home service robot's work area may be the master bedroom, living room, second bedroom, kitchen, bathroom, balcony and other areas. When the home service robot is moving in the work area, the structured light component in the structured light module can be used to collect the structured light data in the home environment, and based on the structured light data, the boundary of a specific area existing in the work area in front of the home service robot can be identified information. In addition, the visual sensor (such as an RGB camera) in the structured light module can also be used to collect RGB image data in the home environment, and based on the RGB image data, identify the object category that defines a specific object in the work area in front of the home service robot.
[0109] see Figure 9 , when the sweeping robot is working ...
example 2
[0113] see Figure 4c , if the sweeping robot is in the mopping mode, if it recognizes that there is a carpet in the home environment based on the structured light data and / or RGB image data, then the boundary information of the carpet is identified based on the structured light data, and the sweeping robot is controlled to mop the floor Travel along the border of the carpet to avoid the situation where the sweeping robot crosses over the carpet and gets trapped by the longer carpet hairs when mopping the floor. That is to say, the sweeping robot will bypass the carpet to mop the floor when mopping the floor. Of course, if the sweeping robot is in the sweeping mode, when it recognizes that there is a carpet in the home environment based on the structured light data and / or RGB image data, it can cross over to the carpet for cleaning.
example 3
[0115] Take an outdoor lawn mowing robot mowing outdoors as an example. For an outdoor lawn mowing robot, various ditches and depressions in the ground environment are specific areas that need to be avoided. Where there is grass in the ground environment is not a specific area to avoid, but an area to work on that needs to be mowed. Therefore, when the outdoor lawn mowing robot is mowing the lawn, if it is recognized based on the structured light data and / or RGB image data that various ditches, depressions, etc. are specific areas that need to be avoided, then along the boundary of the specific area Perform sideways movement to avoid the danger of entering certain areas. If a grassy area is identified based on the structured light data and / or RGB image data, then enter the grassy area for mowing.
[0116] It should be noted that the subject of execution of each step of the method provided in the foregoing embodiments may be the same device, or the method may also be executed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More