Target trajectory prediction method based on Kalman filtering multi-motion model switching
A Kalman filter and target trajectory technology, applied in complex mathematical operations, image data processing, instruments, etc., can solve problems such as unsatisfactory motion model tracking effects, avoid storage and synchronous calculation iterations, and improve estimation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
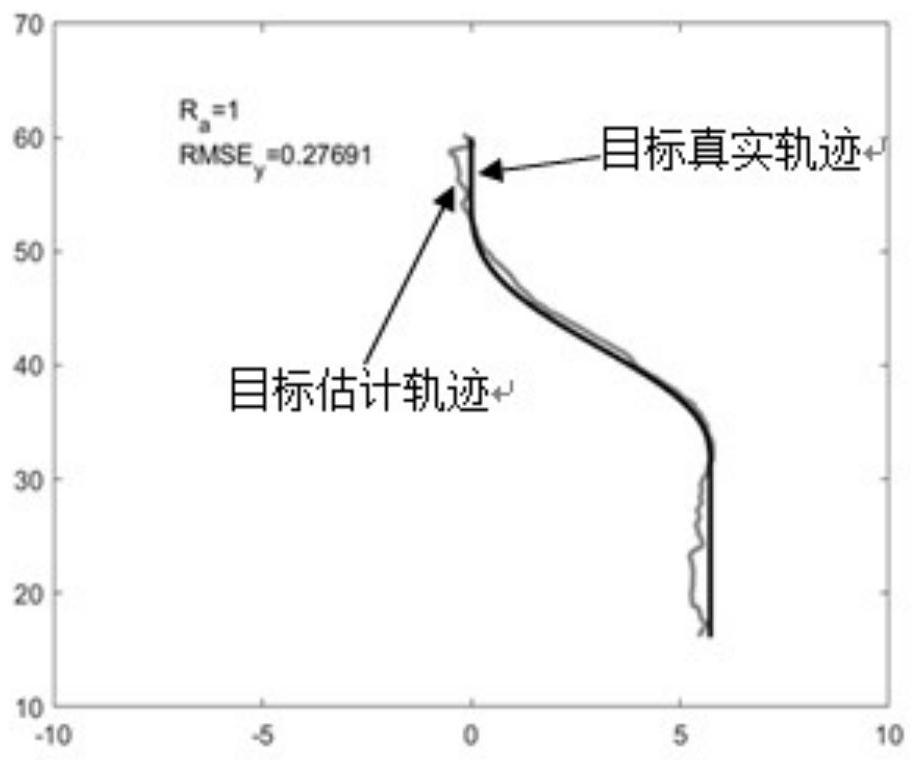
[0153] Take the target vehicle detected by the millimeter-wave radar when the own vehicle changes lanes as an example:
[0154] like Figure 4 As shown, within 7s, 0~2s is decelerating straight, 2~5s is uniform lane change, 5s~7s is accelerating straight, the real trajectory of the target is a black line, and the millimeter wave radar observation trajectory Z(k) is a point shape:
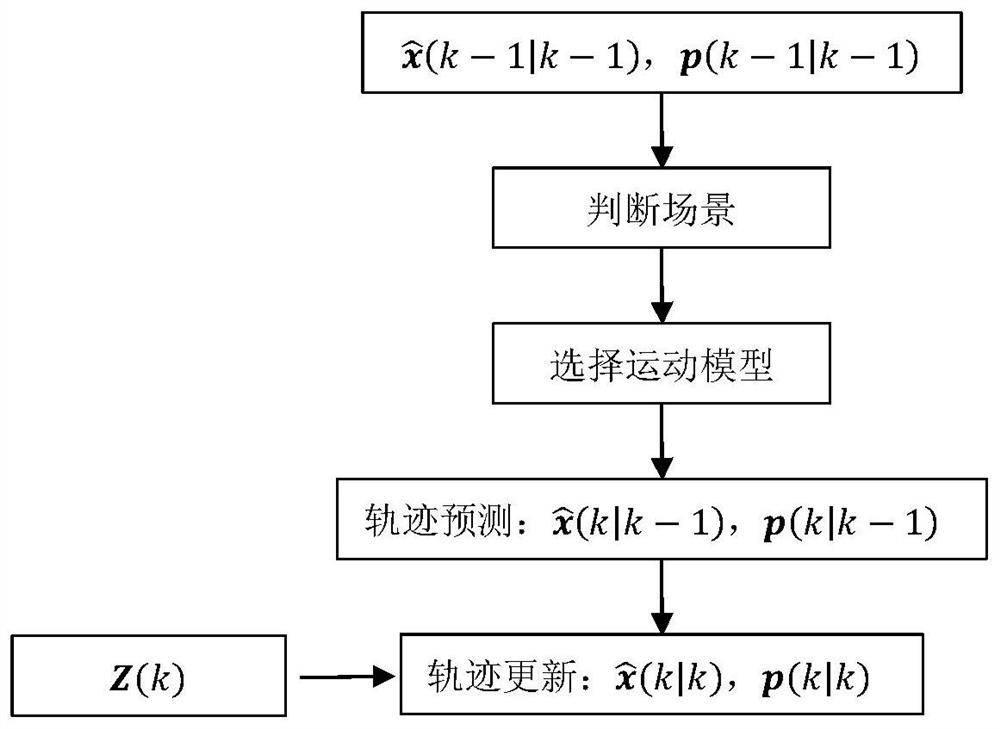
[0155] 1. Establish a target tracking model based on the Kalman multi-motion model, assuming no parameter noise:
[0156]
[0157] p(k|k-1)=A i p(k-1|k-1)A i T +Q(k)
[0158] K=p(k|k-1)H T (Hp(k|k-1)H T +R) -1
[0159]
[0160] p(k|k)=p(k|k-1)-KHp(k|k-1)
[0161] in:
[0162]
[0163] i={1, 2, 3}
[0164]
[0165]
[0166] in:
[0167]
[0168]
[0169] (v y ', v x ' is the state value of the previous frame)
[0170] 2, model switching,
[0171] According to the scene, this period of time is divided into three stages, the early deceleration stage, the middle la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com