

Interference-compensated tracking control method for hypersonic-speed variable-swept-wing aircraft
A hypersonic, tracking control technology, applied in non-electric variable control, vehicle position/route/altitude control, control/regulation system, etc., can solve problems such as difficulty in ensuring the stability of hypersonic aircraft regardless of state and input constraints , to achieve the effect of improving stability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
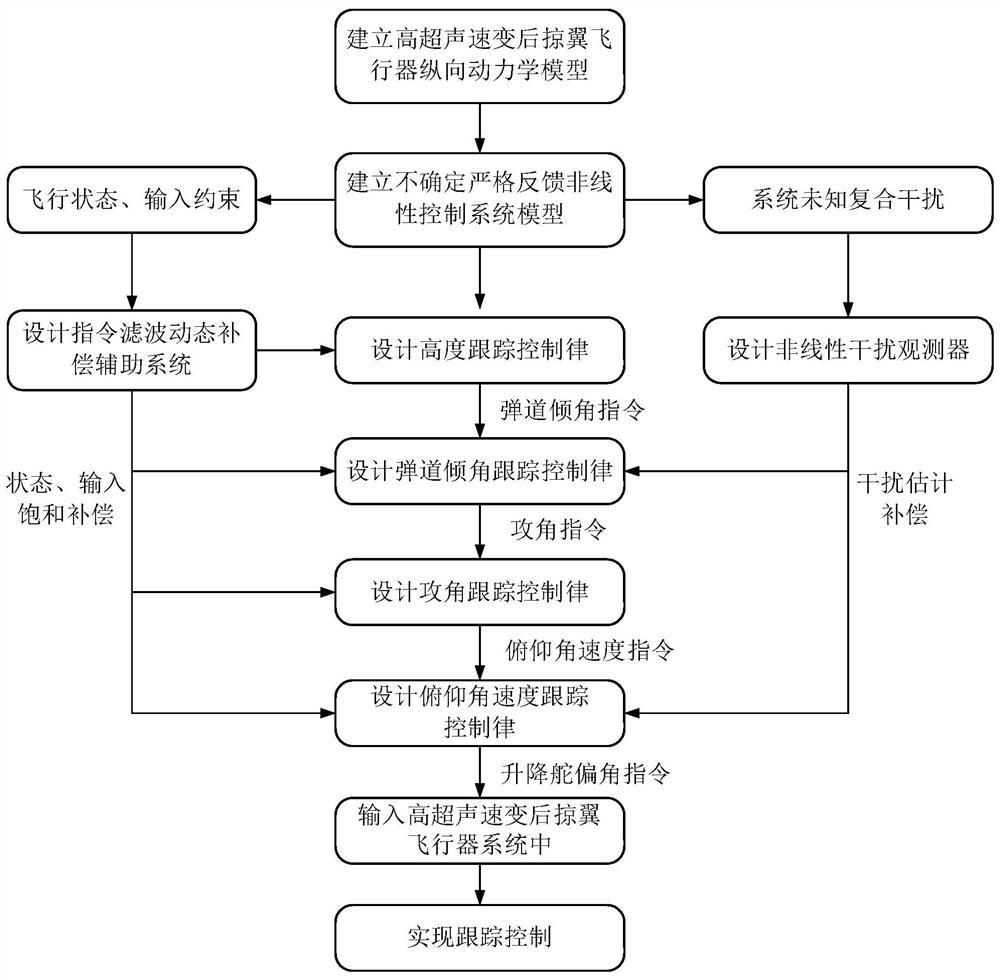
[0081]Step 1. Considering the flight state constraints, input saturation effects, additional disturbances generated by the continuous deformation process, and aerodynamic parameter uncertainties, a longitudinal dynamics model of the hypersonic variable-sweep wing aircraft is established.
[0082] Taking the variable-sweep-wing Morphing Waverider (VMW) aerodynamic and structural data as an example, the longitudinal dynamic model is established as follows:
[0083]
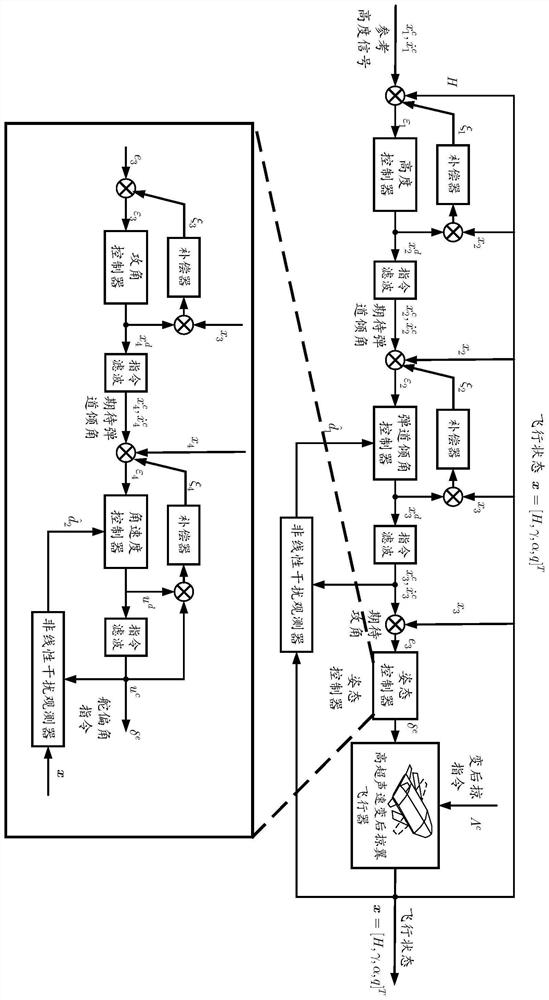
[0084] Among them, H is the flight height, X is the forward flight distance, V is the flight speed, γ is the ballistic inclination angle, θ is the pitch angle of the body, α is the flight angle of attack, q is the pitch angular velocity, and Λ is the wing sweep angle. The total mass of the aircraft is m=600kg, is the moment of inertia of the body about the center of mass of the body, is the moment of inertia of the wing to the center of mass of the body, specifically:
[0085]
[0086] g=μ / r 2 is the loca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More