

Multi-robot cooperative task allocation method and device and medium
A multi-robot, distribution method technology, applied in the direction of instruments, data processing applications, resources, etc., can solve problems such as low efficiency, chaotic task allocation logic, and difficulty in obtaining ideal results, so as to achieve reasonable planning, ensure work efficiency, and improve data transmission. speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the purpose, technical solution and advantages of the present application clearer, the technical solution of the present application will be clearly and completely described below in conjunction with specific embodiments of the present application and corresponding drawings. Apparently, the described embodiments are only some of the embodiments of the present application, rather than all the embodiments. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
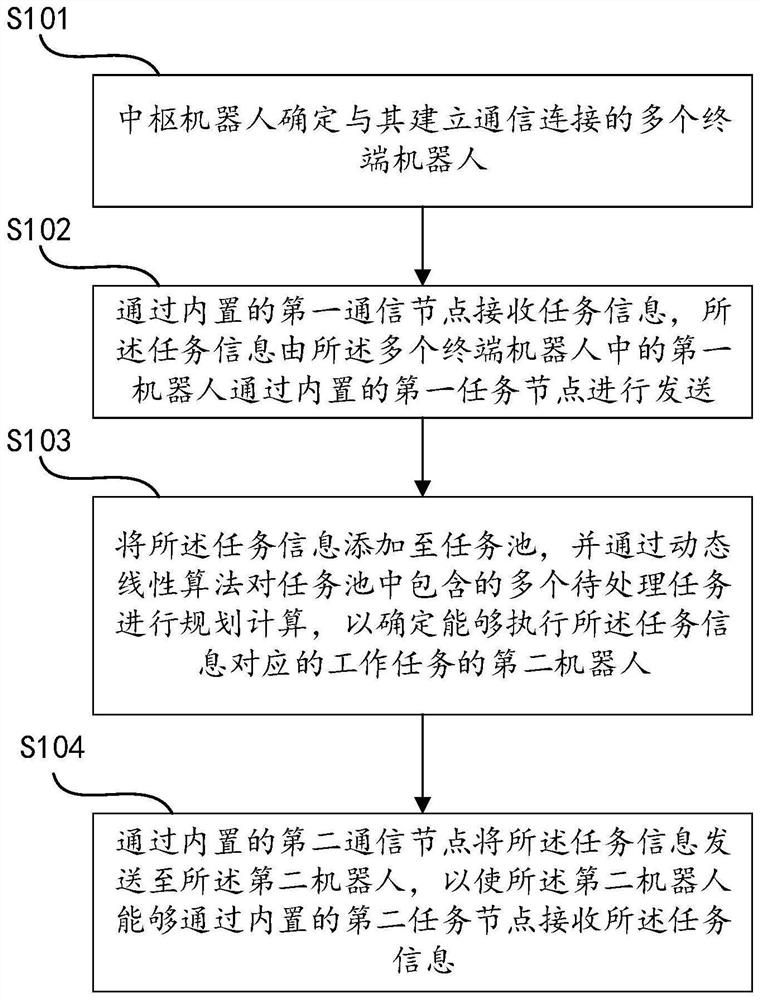
[0023] First of all, it needs to be explained that a multi-robot collaborative task assignment method described in this application is stored in the central robot, and the central robot has at least built-in hardware devices such as processors, memory, and communication equipment, which can be the technology in this application. The solution provides ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More