

Cooperative navigation method between small celestial body detectors
A collaborative navigation and detector technology, applied in the field of deep space exploration, can solve the problem of large influence of navigation and measurement information on estimation accuracy, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
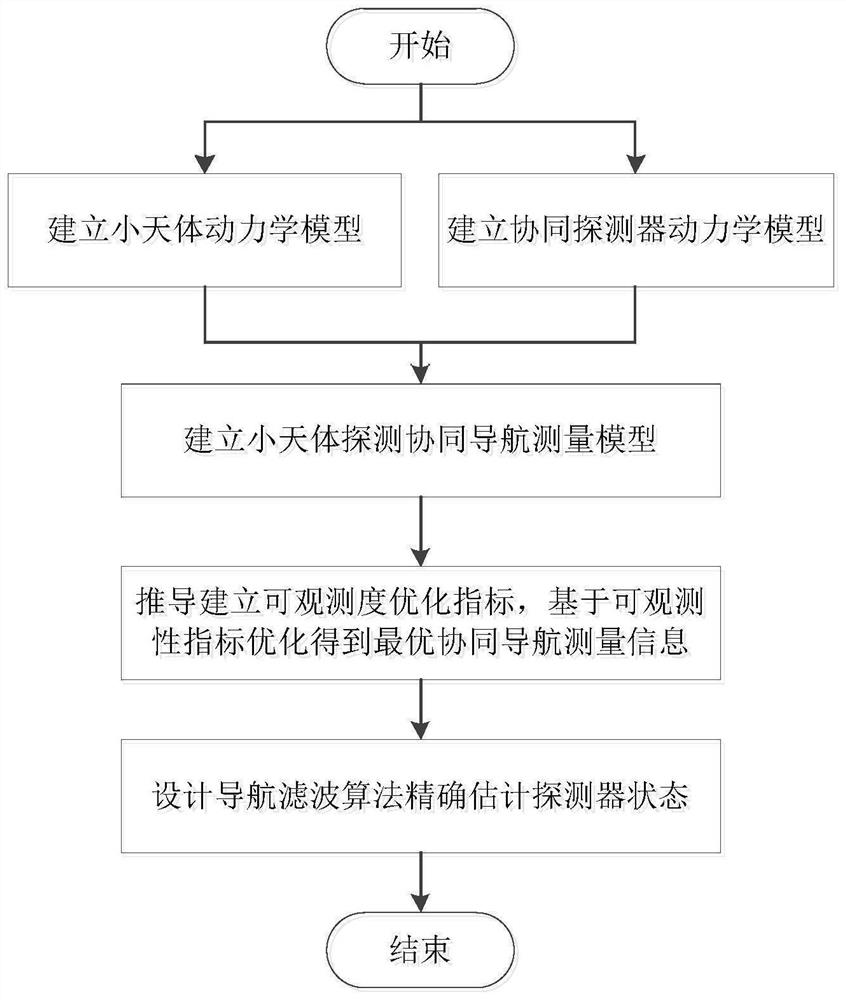
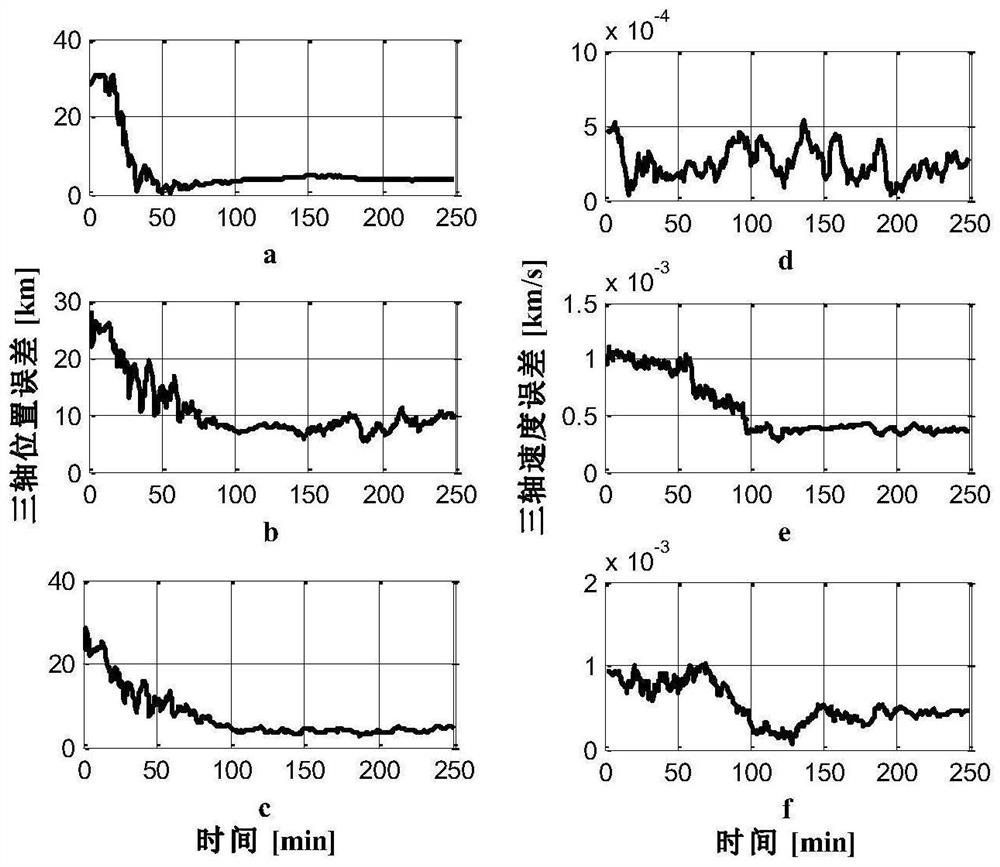
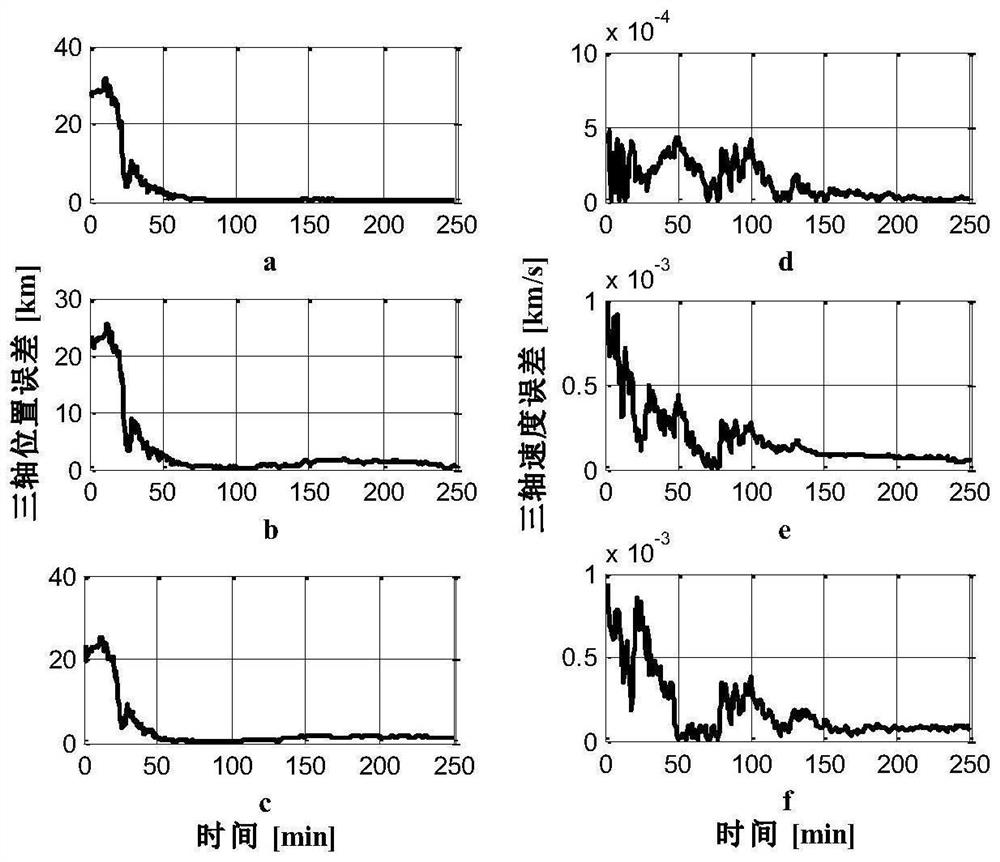
[0056] This example is aimed at the approaching section of small celestial bodies, taking two cooperative detectors as an example to verify and analyze the optimization method of cooperative navigation measurement information. By introducing collaborative measurement information, the observability and accuracy of the navigation system are improved. Based on the observability analysis, the cooperative navigation measurement information is optimized and selected to further improve the observability and accuracy of the navigation system. The resolution of the camera is 1024×1024, and the field of view of the camera is 10°. The initial state of detector A in the heliocentric inertial system is [-87661306km, -190962919km, -81325101km, -9.13km / s, -10.79km / s, -6.67km / s]. The initial state under is [-87657556km, -190968450km, -81317523km, -8.69km / s, -10.44km / s, -6.72km / s], and the initial state of the small celestial body in the heliocentric inertial system is [-87706306km, -1910079...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More