

Multi-robot collaborative assembly line balancing method considering energy efficiency
A multi-robot, assembly line technology, applied in the instrument, energy industry, multi-objective optimization and other directions, can solve the problems of high cost and energy consumption of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0081] experiment
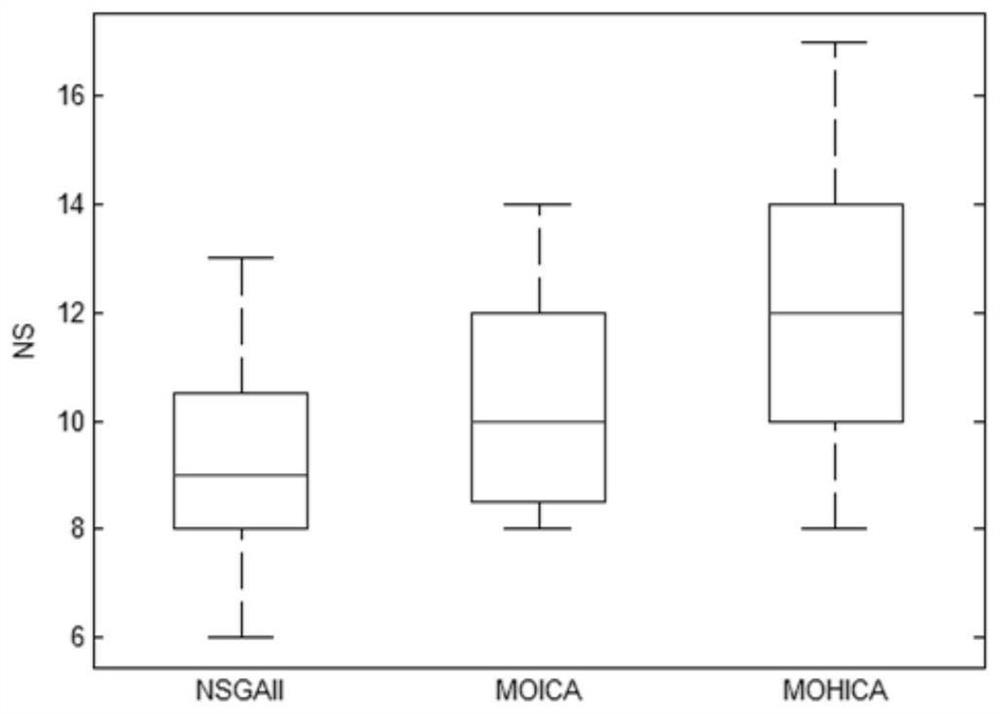
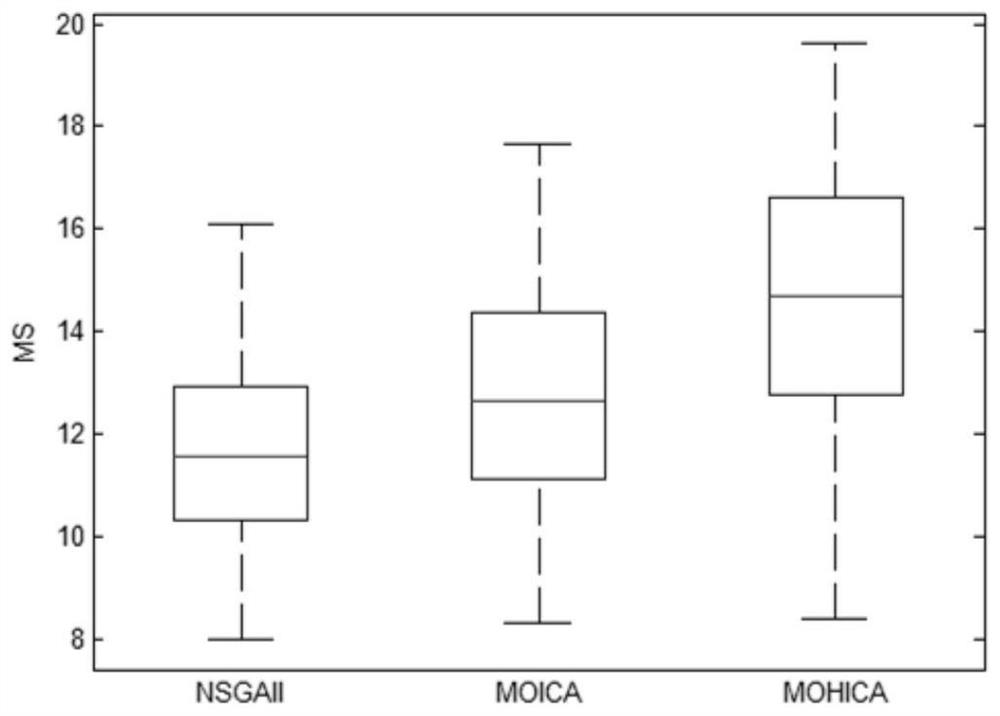
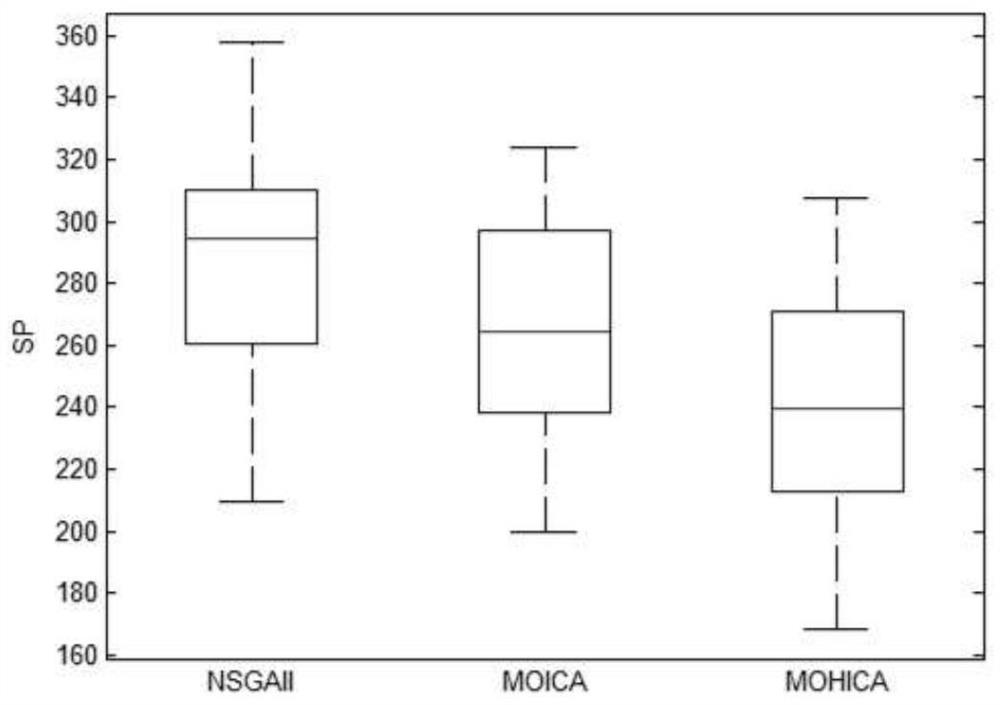
[0082] Based on the prioritization diagram of five classic problems (Jackson, Rosenberg, Gunther, Hahn, Tonge) proposed by previous research on assembly line balancing problems (http: / / www.assembly-line-balancing.de / ), random generation of robots Assemble the time and energy consumption of each task, and divide each problem into 4 different workstations, a total of 20 sets of data for experiments.
[0083] At the same time, the multi-objective imperialist competitive algorithm (MOHICA) proposed by the present invention is combined with the multi-objective imperialist competitive algorithm (Multi-Objective Imperialist Competitive Algorithm, MOICA) and the classical algorithm non-dominated selection that currently has better performance in solving multi-objective problems The genetic algorithm (NSGA-II) was ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More