Distributed multi-unmanned ship adaptive neural network formation control method considering input quantization
A neural network and control method technology, applied in the field of distributed multi-unmanned ship adaptive neural network formation control, can solve the problem of not considering control input quantization and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
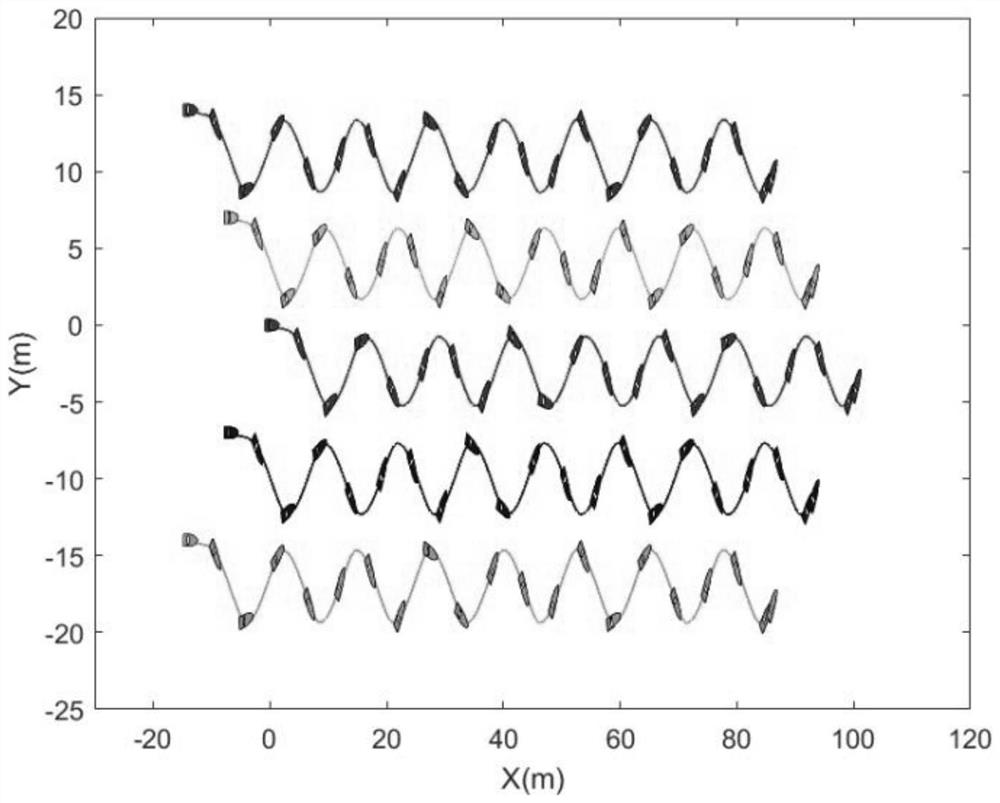
[0214] In order to verify the effectiveness of the method of the present invention, the following simulation experiments have been carried out. In this embodiment, they are all underactuated unmanned ships, and the trajectory parameters of the pilot ship are as follows:
[0215] p 0 (t)=[0.2t,2*sin(0.1*t)-3] T ,
[0216] m iu =25.8kg,
[0217] m iv =33.8kg,
[0218] m ir =2.76kg·m 2 ,
[0219] f iu (·)=-5.87u 3 -1.33|u|u-0.72u+m iv vr+1.0948r 2 ,
[0220] f iv (·)=-36.5|v|v-0.8896v-0.805v|r|-m iu ur,
[0221] f ir (·)=-0.75|r|r-1.90r+0.08v|r|+(m iu -m iv )uv-1.0948ur;
[0222] The initial status of the five ships is as follows:
[0223] p 1 =[0,0] T ;p 2 =[-7,7] T ;p 3 =[-7,-7] T ;p 4 =[-14,14] T ;p 5 =[-14,-14] T ;
[0224] The desired formation state is as follows:
[0225] p 1d =[0,0] T ;p 2d =[-7,7] T ;p 3d =[-7,-7] T ;p 4d =[-14,14] T ;p 5d =[-14,-14] T
[0226] The controller parameters are as follows:
[0227] c iu = c ir =1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More