

Correction method and system for grabbing and positioning errors of mobile robot and robot
A mobile robot, grasping and positioning technology, applied in the field of mobile robots, can solve the problems of insufficient positioning accuracy, limited practicality, high cost of positioning technology equipment, etc., and achieve the effect of low hardware cost, simple structure and fast speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0123] The content of the following embodiments is illustrated as an example. The mobile robot mainly includes: an automatic navigation car, a robotic arm, an electric gripper, an industrial camera, a two-dimensional code identification, and a shelf at a site. Among them: the robotic arm is installed on the AGV, the electric gripper and industrial camera are installed on the robotic arm, and the QR code logo is installed on the station shelf, which is the shelf where the robot needs to pick up or store goods.
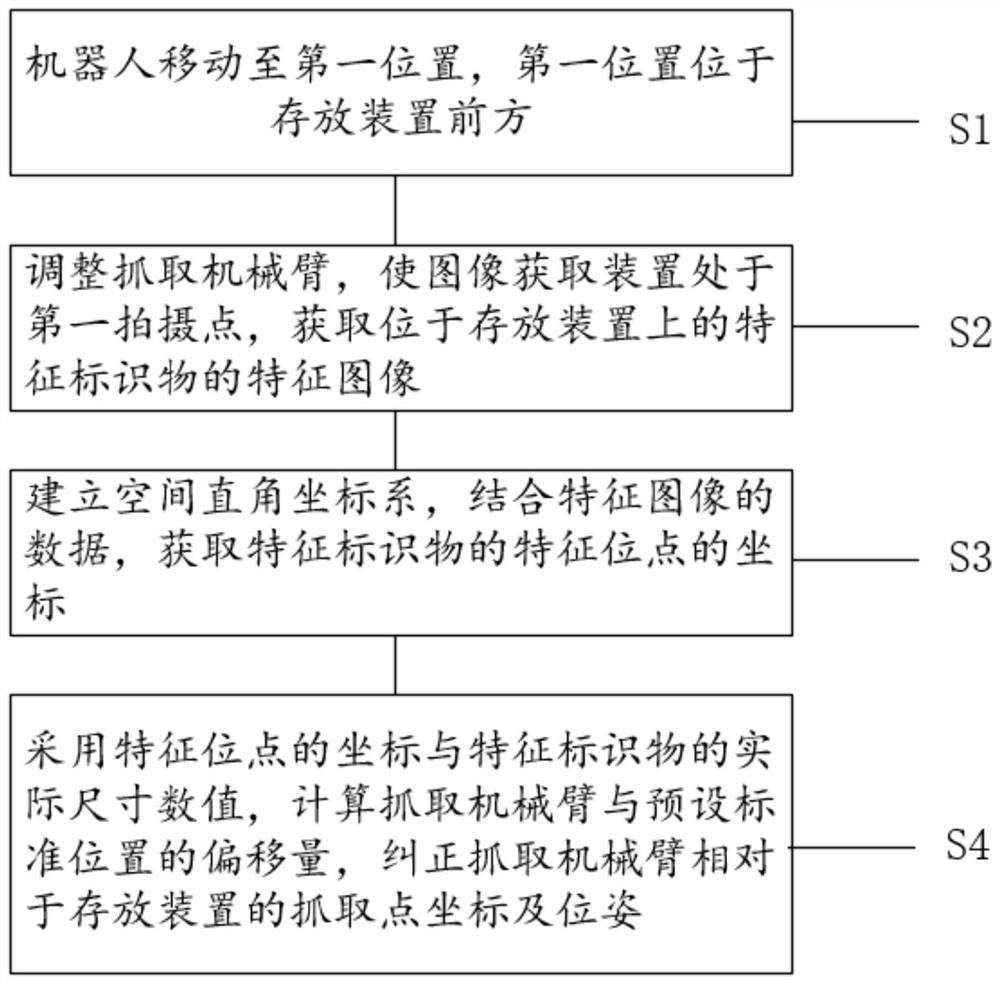
[0124] The invention mainly corrects the alignment error when the mobile robot stops at the station, and improves the accuracy of the mechanical arm grabbing items on the station shelf. The specific process of correcting the robot positioning error is as follows:
[0125] The first step: site parameter calibration
[0126] 1. The AGV is parked at a fixed point at the station, and the position and posture of the AGV are manually adjusted so that the AGV body is parallel...
Embodiment 2
[0196] Such as Figure 4 As shown, according to a method for correcting robot positioning errors, a system for realizing the correction of mobile robot grasping and positioning errors is provided, which makes the invention more systematic. A system for realizing the correction of mobile robot grasping and positioning errors includes multiple storage Bit storage device 1 and robot 2;
[0197] Droid 2 includes:
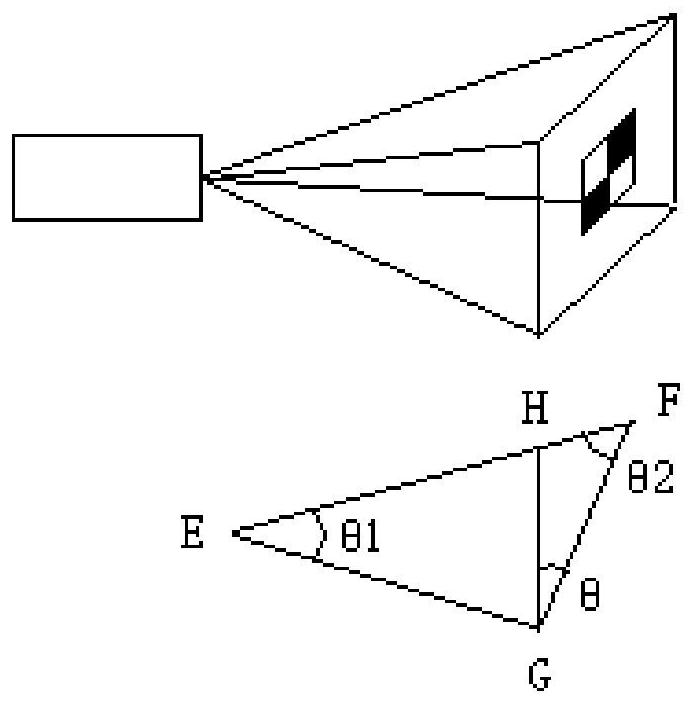
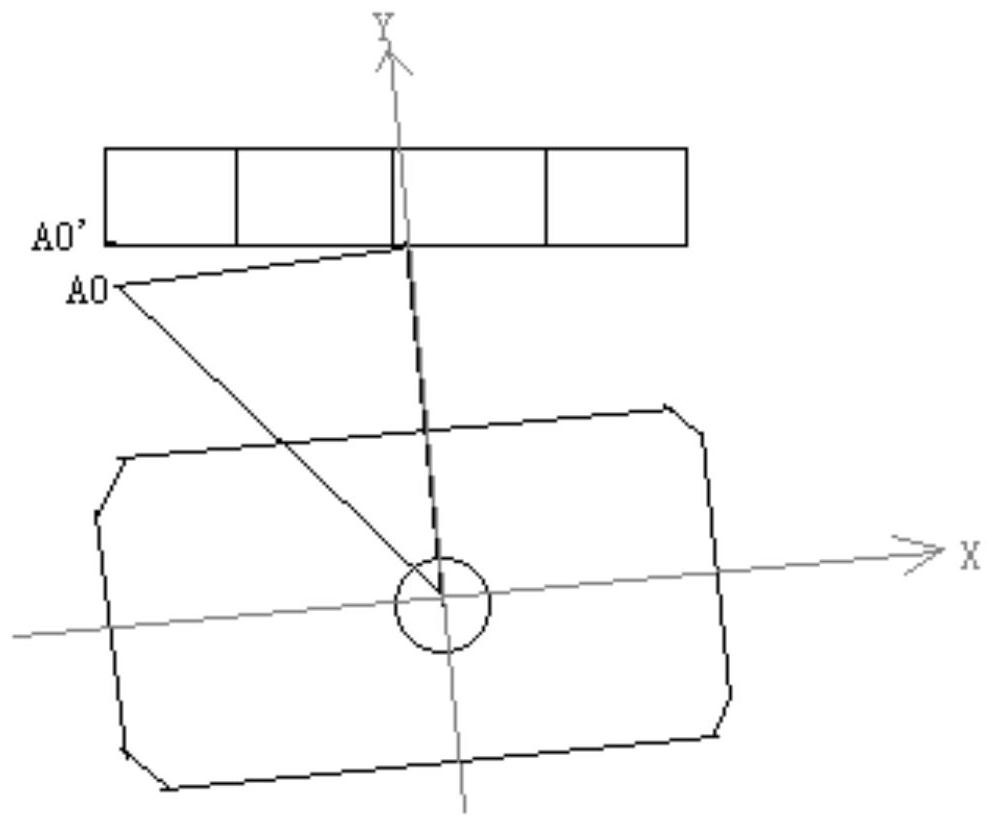
[0198] Image acquisition device 21: used to acquire the characteristic image of the characteristic identifier;
[0199] Processor 22: used to calculate the coordinate value of the feature image and obtain the offset;
[0200] Grabbing mechanical arm 23: used to move the position of the driving mechanism according to the driving instruction sent by the processor;
[0201] Moving mechanism 24: used for moving the vehicle body of the robot according to the moving instruction sent by the processor.
[0202] Wherein, processor 22 includes:
[0203] Picking coordinate mo...
Embodiment 3
[0208] Such as Figure 5 As shown, the present invention also provides a robot, including an image acquisition device, a processor, a driving mechanism, a gripping mechanism, a car body and a moving mechanism, a driving mechanism is provided above the car body, a moving mechanism is provided below the car body, and the moving mechanism It is used to control the movement of the car body. The top of the driving mechanism is equipped with a clamping mechanism, and an image acquisition device is installed above the clamping mechanism. The processor is installed inside the robot, and the processor is used for error correction of positioning errors.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More