

Quaternion-based finite time fault-tolerant trajectory tracking control method for full-drive anti-backing-off underwater robot
An underwater robot and trajectory tracking technology, applied in the direction of non-electric variable control, height or depth control, control/regulation system, etc., can solve problems such as control system paralysis, control performance degradation, and singularity of underwater robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0041] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0042] A finite-time fault-tolerant trajectory tracking control method for a full-drive anti-unwinding underwater robot based on quaternions proposed according to an embodiment of the present invention will be described below with reference to the accompanying drawings.
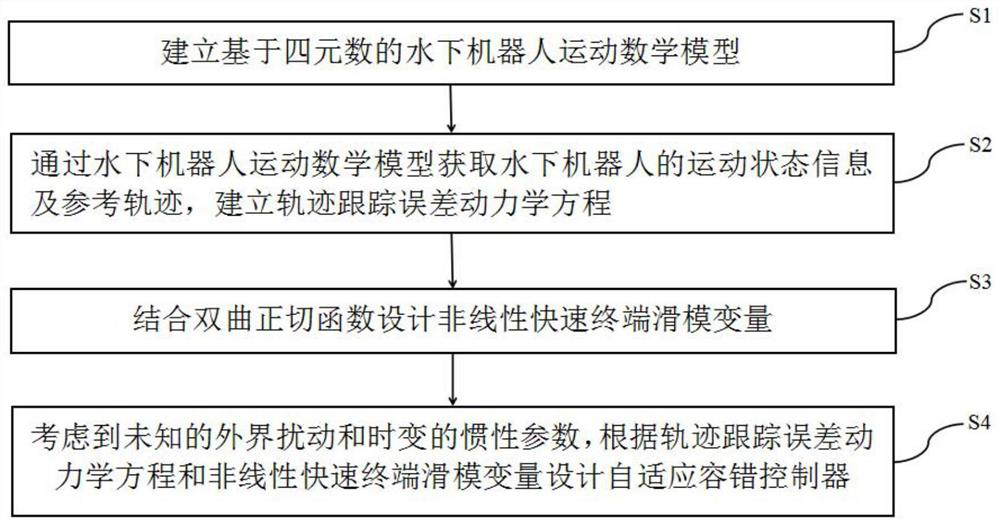
[0043] figure 1 It is a flow chart of a quaternion-based full-drive anti-unwinding underwater robot finite-time fault-tolerant trajectory tracking control method according to an embodiment of the present invention.
[0044] like figure 1 As shown, the quaterni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More