Two-shaft platform for tracked robot
A crawler robot and platform technology, applied in crawler vehicles, motor vehicles, chemical instruments and methods, etc., can solve the problem that the angle of the fire water gun cannot be freely rotated, so as to improve labor efficiency and convenience, reduce work intensity and danger. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
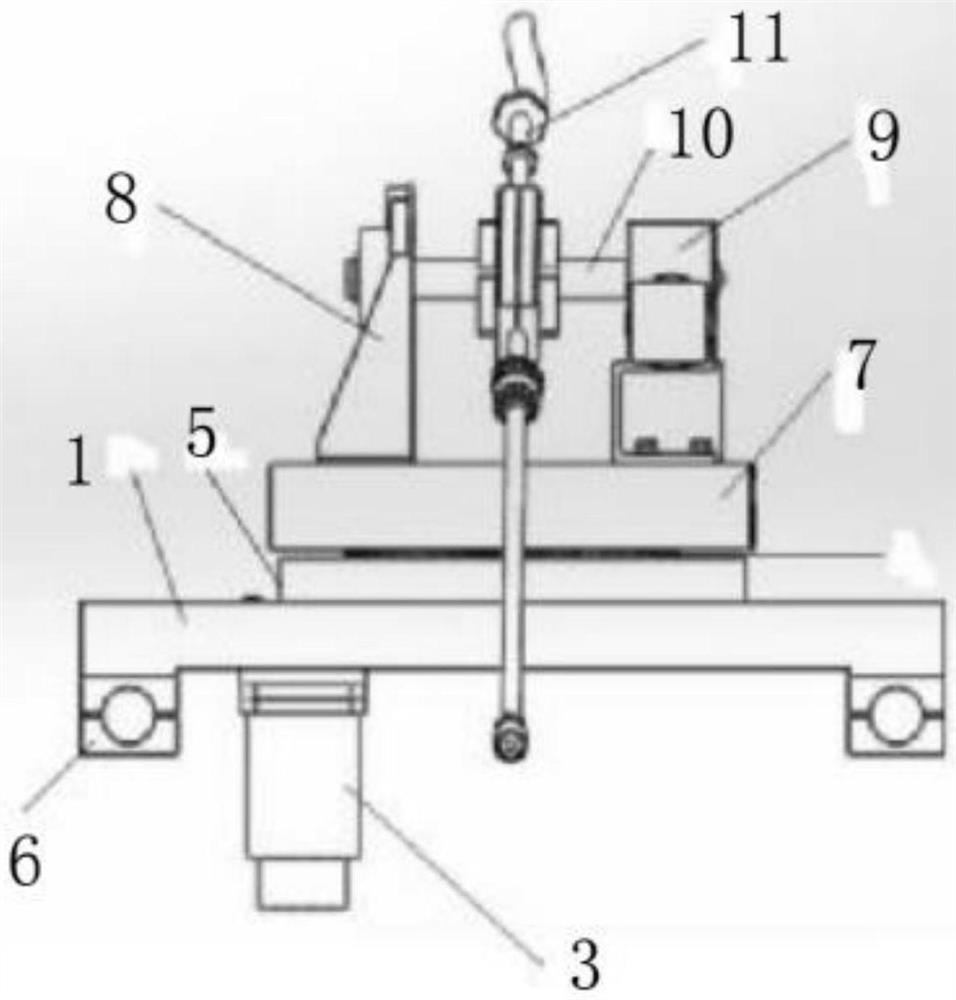
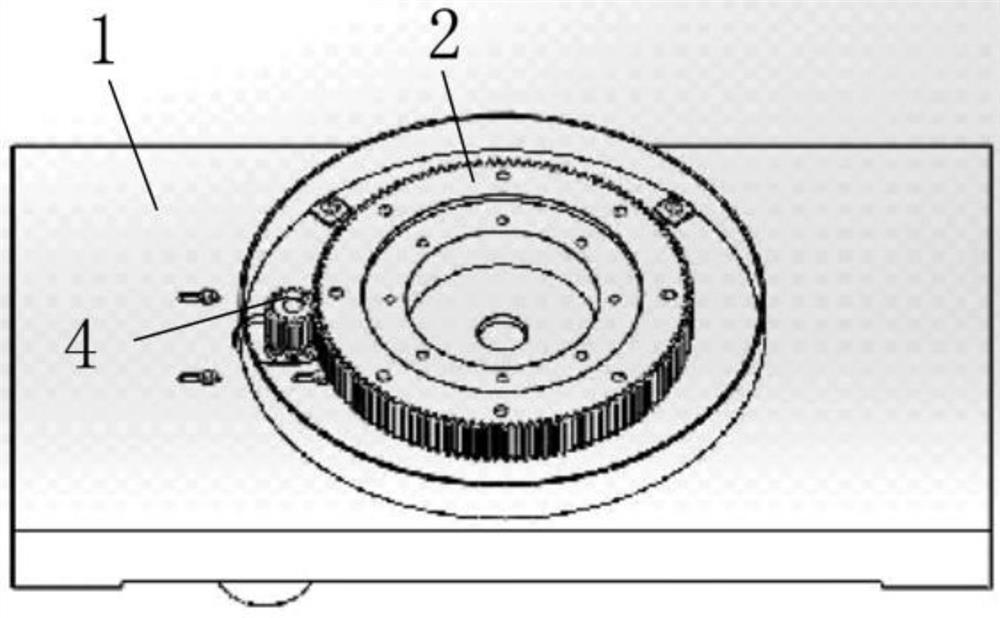
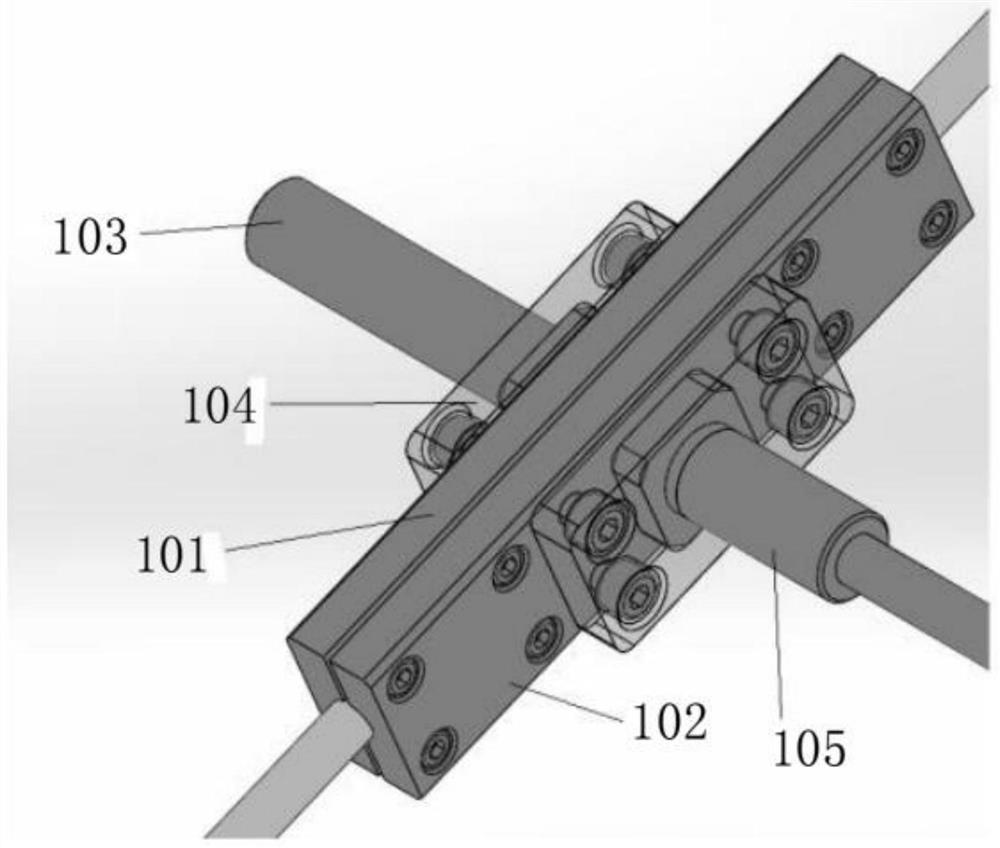
[0027] Please refer to figure 1 , figure 2 , image 3 ,in, figure 1 Schematic diagram of the structure of the first embodiment of the two-axis platform for the crawler robot provided by the present invention; figure 2 for figure 1 The perspective view of the partial structure of the fixed seat of the slewing support bearing shown; image 3 for figure 1 A perspective view of the Z-axis rotation device shown. A two-axis platform for a crawler robot includes: a slewing support bearing fixing base 1, a slewing supporting bearing 2 is rotatably connected to the slewing supporting bearing fixing base 1, and an autorotation rotating motor 3 is fixedly installed on the slewing supporting bearing fixing base 1, The output end of the self-rotating rotary motor 3 is fixedly equipped with a gear 4, the outer guard 5 of the ring gear is fixedly installed on the fixed seat 1 of the slewing support bearing, and the bottom of the fixed seat 1 of the slewing support bearing 1 is fixedl...
no. 2 example
[0050] see image 3 with Figure 5 , based on the two-axis platform for a crawler robot provided in the first embodiment of the present application, the second embodiment of the present application proposes another two-axis platform for a crawler robot. The second embodiment is only a preferred mode of the first embodiment, and the implementation of the second embodiment will not affect the independent implementation of the first embodiment.
[0051] Specifically, the difference between the two-axis platform for a crawler robot provided by the second embodiment of the present application is that, for the two-axis platform for a crawler robot, a positioning assembly 12 is arranged on the base 7 of the rotating platform, and the positioning assembly 12 includes Mounting groove 121, the interior of described mounting groove 121 is slidably connected with locating rod 122, and the surface of described locating rod 122 is fixedly installed with mounting plate 123, and the surface ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap