

Gearbox state fault diagnosis method based on multi-scale multi-source heterogeneous information fusion
A multi-source heterogeneous and fault diagnosis technology, applied in neural learning methods, machine/structural component testing, neural architecture, etc., can solve problems such as vibration signal acquisition system failure, large noise, and CNN feature extraction capabilities need to be improved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
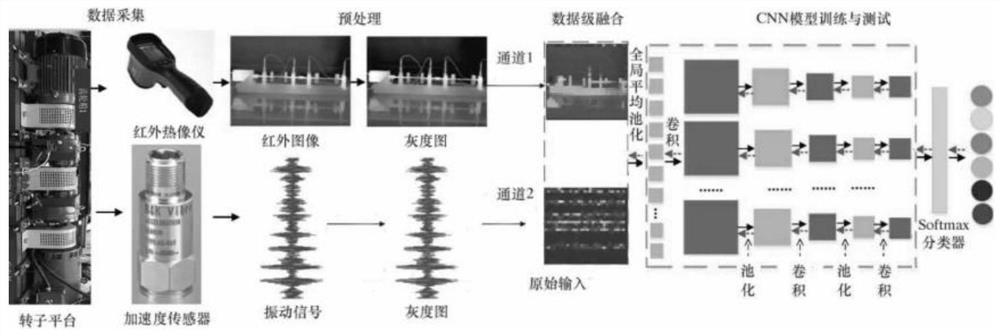
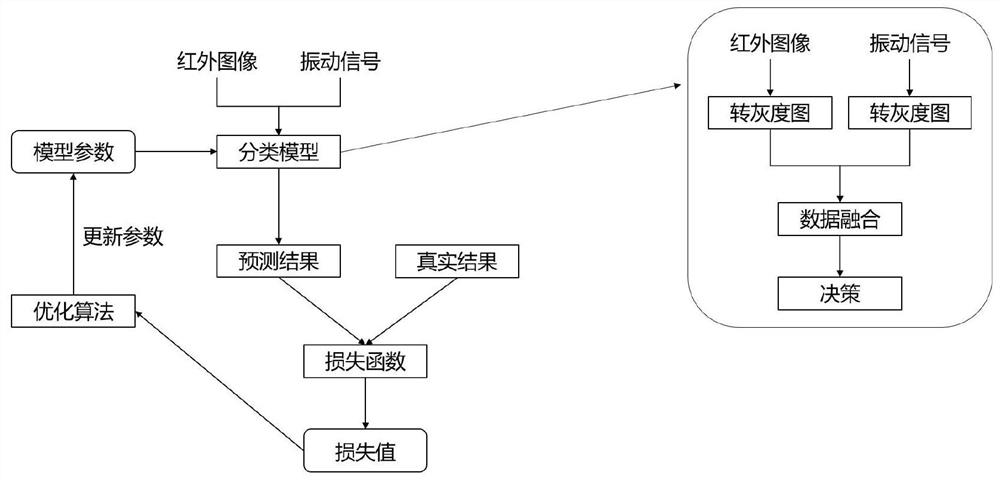
[0098] Data Layer Fusion
[0099] By reading the infrared image and zooming to get its uniform size digital matrix, its form is [64,32,3], and the vibration information with a length of 2048 is normalized into a grayscale image, the specific form is [64,32,1 ], the two matrices are fused in the last dimension, that is, the channel, and reshaped into a matrix of [64,32,4] as the input of the neural network.
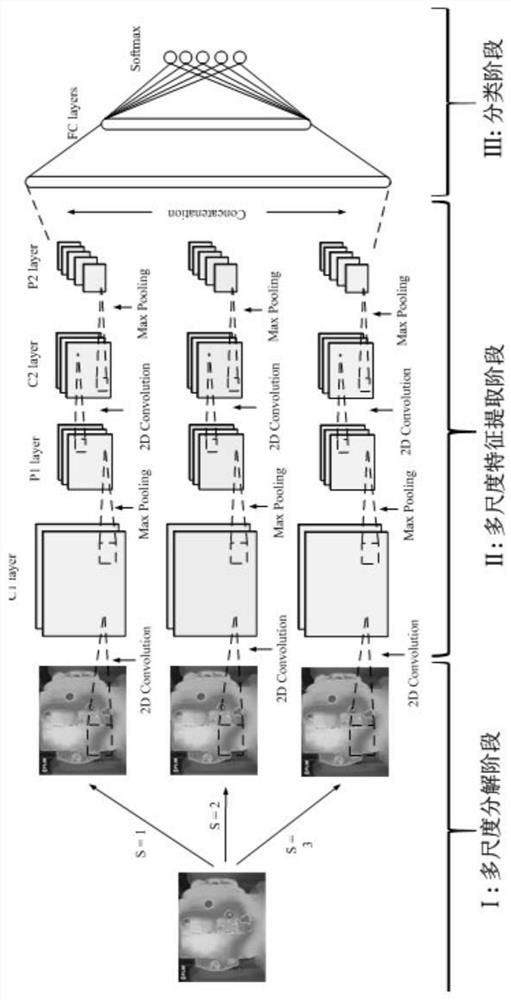
[0100] feature extraction
[0101] Input a fused image of 64×32×4 on the first scale, go through 16 convolution kernels with a kernel size of 3×3, select a step size of 1×1, and obtain a convolutional layer output of 64×32×16;
[0102] The Relu activation function is used to activate and output; after the maximum pooling layer with a kernel size of 2×2 and a step size of 2×1, a pooling layer output of 32×32×16 is obtained;
[0103] After repeating the above-mentioned convolution, activation, and pooling twice, a 4×4×4 feature is obtained;
[0104] On the second scale, i...
Embodiment 2
[0111] Data Fusion
[0112] Convert the read infrared image into a grayscale image, the size is [64,32,1], normalize the vibration information with a length of 2048 and convert it into a grayscale image, the specific form is [64,32,1] , to realize the fusion of the two matrices, and reshape the matrix of [64,32,2] as the input of the neural network.
[0113] feature extraction
[0114] Input a fused image of 64×32×2 on the first scale, pass through 16 convolution kernels with a kernel size of 3×3, select a step size of 1×1, and obtain a convolutional layer output of 64×32×16;
[0115] The Relu activation function is used to activate and output; after the maximum pooling layer with a kernel size of 2×2 and a step size of 2×1, a pooling layer output of 32×32×16 is obtained;
[0116] After repeating the above-mentioned convolution, activation, and pooling twice, a 4×4×4 feature is obtained;
[0117] On the second scale, input a fusion image of 32×16×4, and obtain the features of...
Embodiment 3
[0124] Data Fusion
[0125] Convert both the infrared image and the vibration signal into a grayscale image with a size of [64,32,1], and then perform horizontal stitching, and the horizontal stitching is a matrix of [64,64,1], that is, to realize the second dimension, namely Fusion over channels, reshape to a matrix of [64, 32, 2] as input to the neural network.
[0126] feature extraction
[0127] Input a fused image of 64×64×1 on the first scale, pass through 16 convolution kernels with a kernel size of 3×3, select a step size of 1×1, and obtain a convolutional layer output of 64×32×16;
[0128] Use the Relu activation function to activate and output; after the maximum pooling layer with a kernel size of 2×2 and a step size of 2×2, a pooling layer output of 32×32×16 is obtained;
[0129] After repeating the above-mentioned convolution, activation, and pooling twice, a 4×4×4 feature is obtained;
[0130] On the second scale, input a fusion image of 32×16×4, and obtain the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More