

Nao robot path planning method based on deep Double-Q network
A path planning and robotics technology, applied in the direction of instruments, motor vehicles, two-dimensional position/channel control, etc., can solve the problems of not being able to obtain environmental information, achieve the effect of improving generalization ability and solving path planning problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
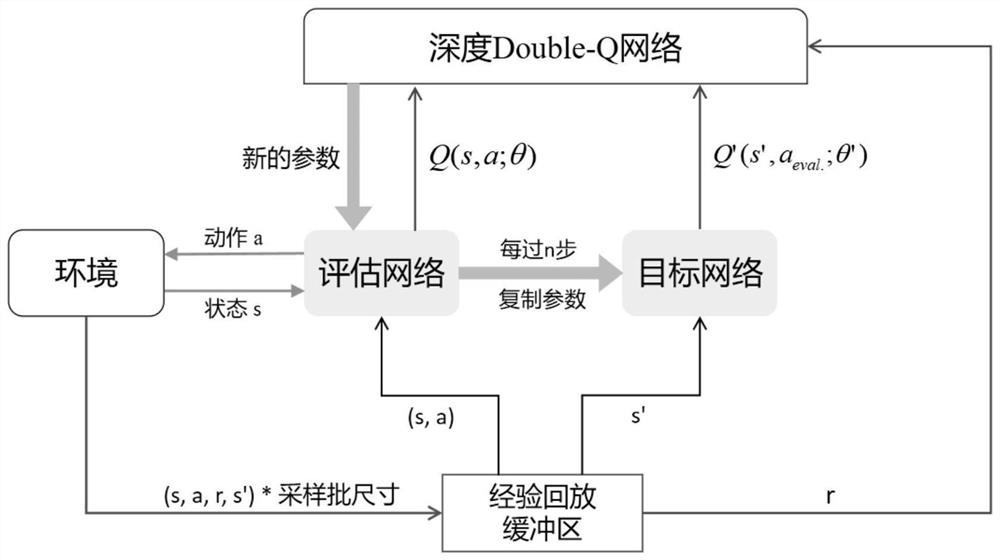
[0060] The basic idea of the present invention is to use the deep Double-Q network to train the robot to complete the path planning task, and can migrate to the real robot and the unknown real environment.
[0061] Step 1: Virtual environment information preprocessing
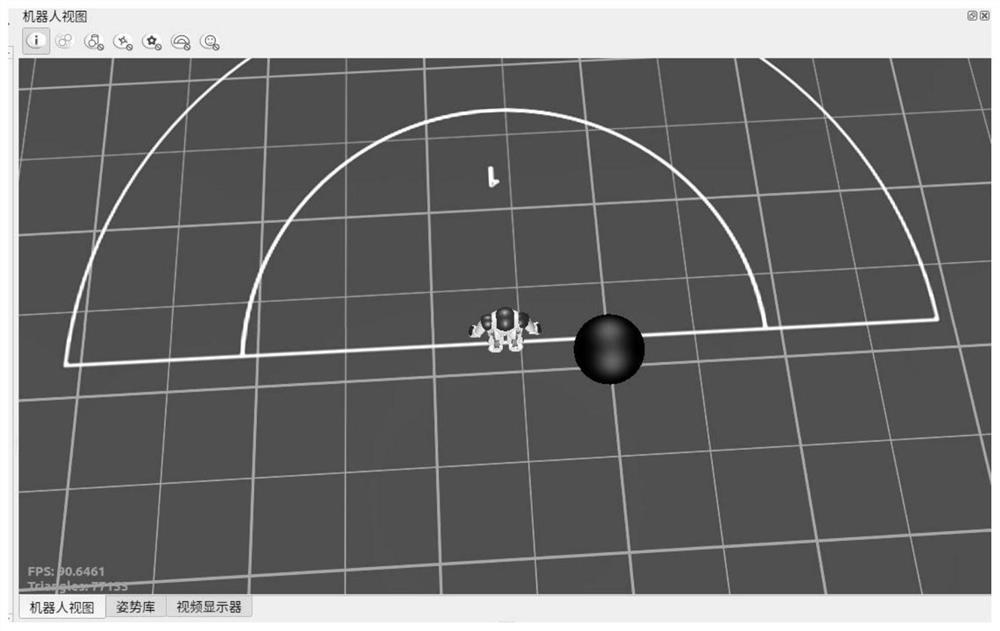
[0062] The Naoqi platform in the Choregraphe software is used as a virtual environment for training Nao robots, such as figure 2 shown. The ultrasonic information of the Nao robot in this virtual environment cannot be called. In order to make the virtual environment consistent with the state information that the robot can obtain in the real environment, it is necessary to preprocess the information in the virtual environment.
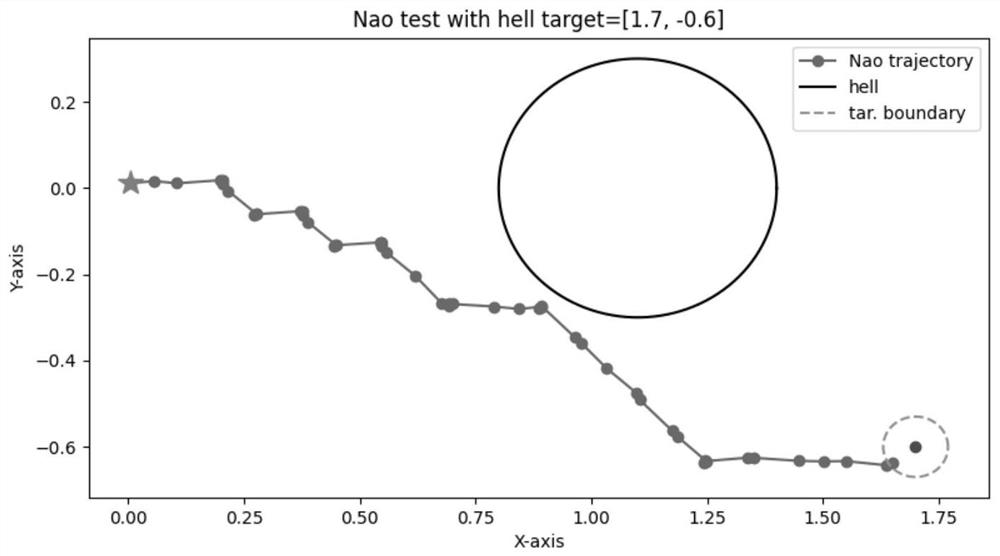
[0063] In the virtual environment, the Nao robot can obtain the relative distance from the obstacle in the X and Y directions, so it is processed based on this:
[0064] (1) When facing an obstacle, calculate the angle between the Nao robot and the obstacle
[0065]
[0066] whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More