

Mass point cloud layered real-time rendering method based on octree index
A real-time rendering and point cloud technology, applied in the field of 3D laser scanning data processing, can solve the problems of data redundancy, empty packets and memory waste, uneven point cloud data, etc., to avoid data redundancy, reduce memory consumption, improve The effect of index query efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be described in detail below in combination with specific embodiments.
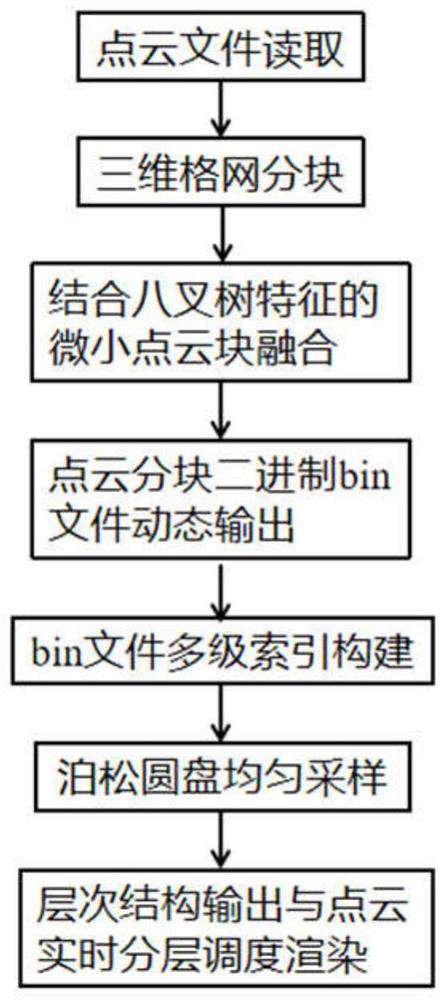
[0073] Present embodiment is based on las point cloud file, and its file size is 28GB, altogether 1.1 billion points; figure 1 Shown in the general flowchart of the present invention, the present invention comprises the following steps:
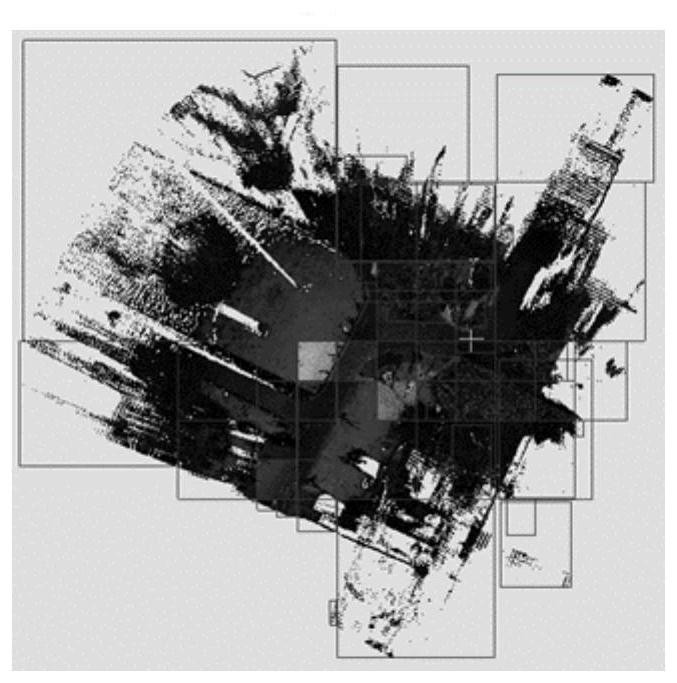
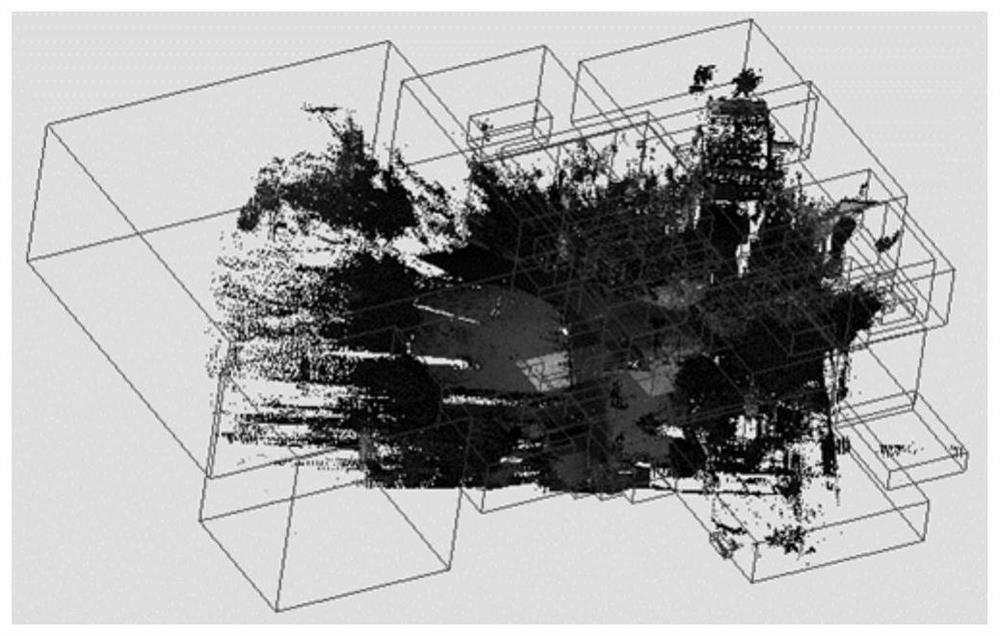
[0074] Step 1: Point cloud 3D grid segmentation
[0075] 1) According to the coordinate range and the number of point clouds recorded in the point cloud file header, define the side length of the three-dimensional space grid unit, and the grid side length is 256; according to the side length of the three-dimensional space grid unit, define the three-dimensional grid linear coding array grid[256*256*256];
[0076] 2) Fixedly read one million points in the point cloud file, access the point coordinates of the one million points according to the address link of the data, and define a thread pool, and use a multi-thread mechanism to dynami...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More