

Intelligent cleaning robot mechanical arm visual obstacle avoidance control method
A technology for cleaning robots and control methods, which is applied in the field of cleaning robots, can solve problems such as inability to complete navigation and operations, poor stability of obstacle avoidance, collision damage of cleaning robots, etc., and achieve the effects of improving safety, prolonging service life, and avoiding collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
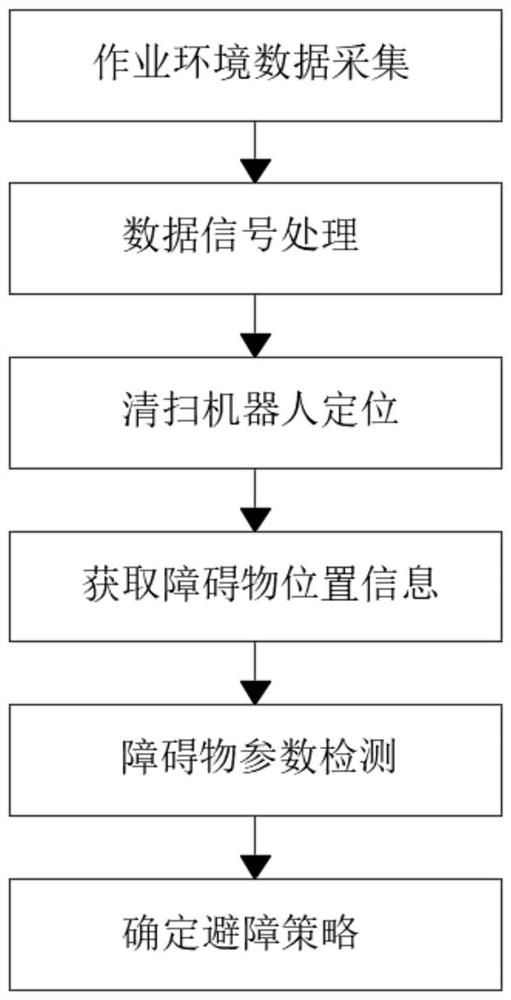
[0027] A control method for visual obstacle avoidance of an intelligent cleaning robot manipulator, the method comprising the following steps:
[0028] (1) Working environment data collection: The cleaning robot scans the working environment through the visual system to collect the environmental data of the working environment. The visual system uses the laser radar and the ranging sensor to scan the environmental data. The environmental data is the scanning data of the laser radar, and The scanning data corresponds to the scanning point of the obstacle, which can detect and record the distance between the cleaning robot and the obstacle in all directions, judge whether the obstacle is in the safe area of the robot, and then avoid the obstacle;
[0029] (2) Data signal processing: The processing system obtains the environmental data collected by the vision system, and then filters the initial scanning data to obtain the scanning data. The filtering process is to filter out th...
Embodiment 2
[0035] A control method for visual obstacle avoidance of an intelligent cleaning robot manipulator, the method comprising the following steps:
[0036] (1) Working environment data collection: The cleaning robot scans the working environment through the visual system to collect the environmental data of the working environment. The visual system uses the laser radar and the ranging sensor to scan the environmental data. The environmental data is the scanning data of the laser radar, and The scanning data corresponds to the scanning point of the obstacle, which can detect and record the distance between the cleaning robot and the obstacle in all directions, judge whether the obstacle is in the safe area of the robot, and then avoid the obstacle;
[0037] (2) Data signal processing: The processing system obtains the environmental data collected by the vision system, and then filters the initial scanning data to obtain the scanning data. The filtering process is to filter out th...
Embodiment 3
[0043] A control method for visual obstacle avoidance of an intelligent cleaning robot manipulator, the method comprising the following steps:
[0044](1) Working environment data collection: The cleaning robot scans the working environment through the visual system to collect the environmental data of the working environment. The visual system uses the laser radar and the ranging sensor to scan the environmental data. The environmental data is the scanning data of the laser radar, and The scanning data corresponds to the scanning point of the obstacle, which can detect and record the distance between the cleaning robot and the obstacle in all directions, judge whether the obstacle is in the safe area of the robot, and then avoid the obstacle;
[0045] (2) Data signal processing: The processing system obtains the environmental data collected by the vision system, and then filters the initial scanning data to obtain the scanning data. The filtering process is to filter out the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More