

Robot pose estimation method and system based on multi-sensor feature fusion
A technology of feature fusion and pose estimation, applied in the field of robotics, can solve problems such as low accuracy rate, complex calculation and low efficiency, and achieve the effect of solving low accuracy rate and accurate pose estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
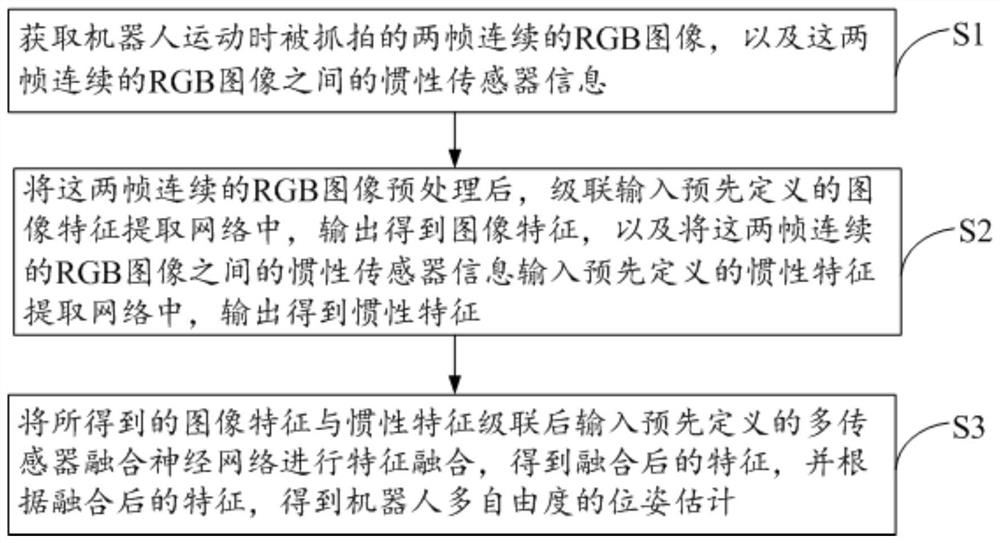
[0030] Such as figure 1 As shown, in the embodiment of the present invention, a robot pose estimation system based on multi-sensor feature fusion is proposed, and the method includes the following steps:
[0031] Step S1, acquiring two consecutive frames of RGB images captured when the robot is in motion, and the inertial sensor information between the two consecutive frames of RGB images;
[0032] Step S2, after preprocessing the two consecutive frames of RGB images, cascade input into the predefined image feature extraction network, output the image features, and input the inertial sensor information between the two consecutive frames of RGB images into the predefined In the inertial feature extraction network, the output is the inertial feature;
[0033] Step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More