

Double-wheel differential driving device and straddle type unmanned forklift
A differential drive, two-wheel technology, used in power units, electric power units, lifting devices, etc., can solve the problems of poor sideshift ability, inconsistent steering angle, low position and attitude adjustment accuracy, and improve control accuracy and stability. The effect of improved slack, sideshift and steering capabilities, and greater agility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
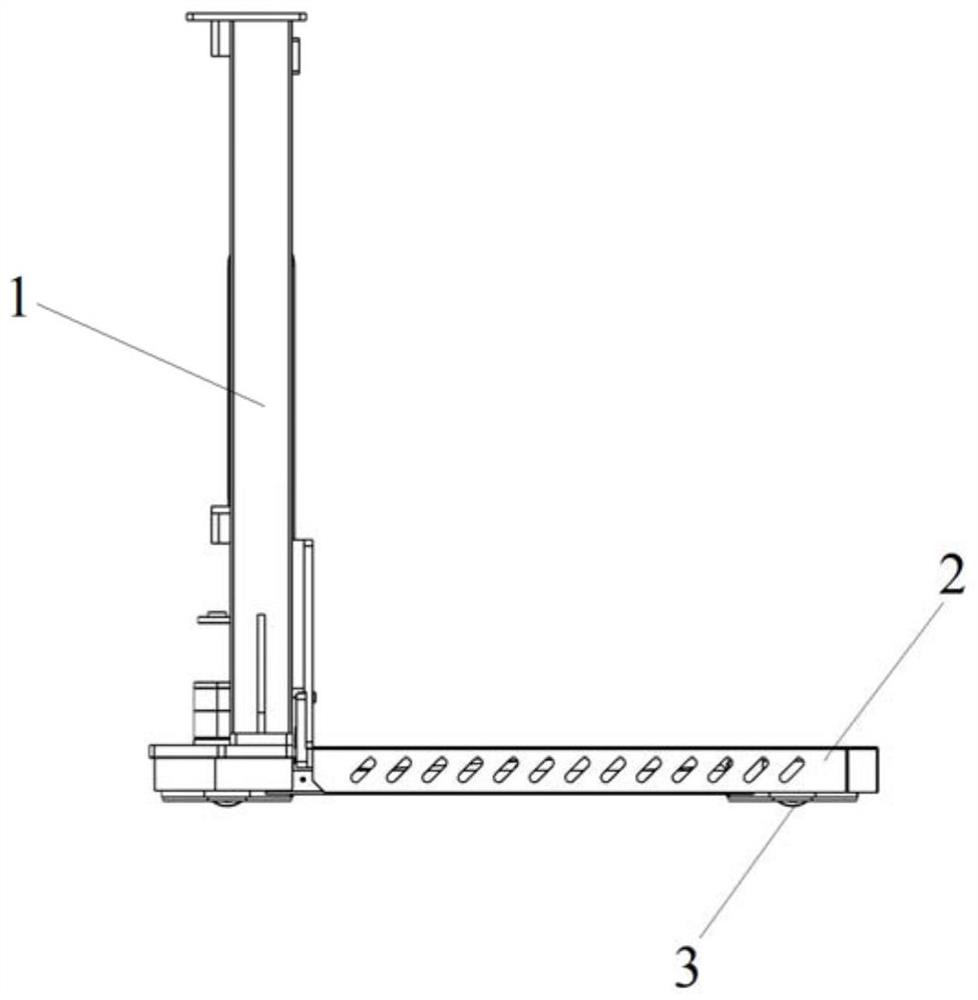
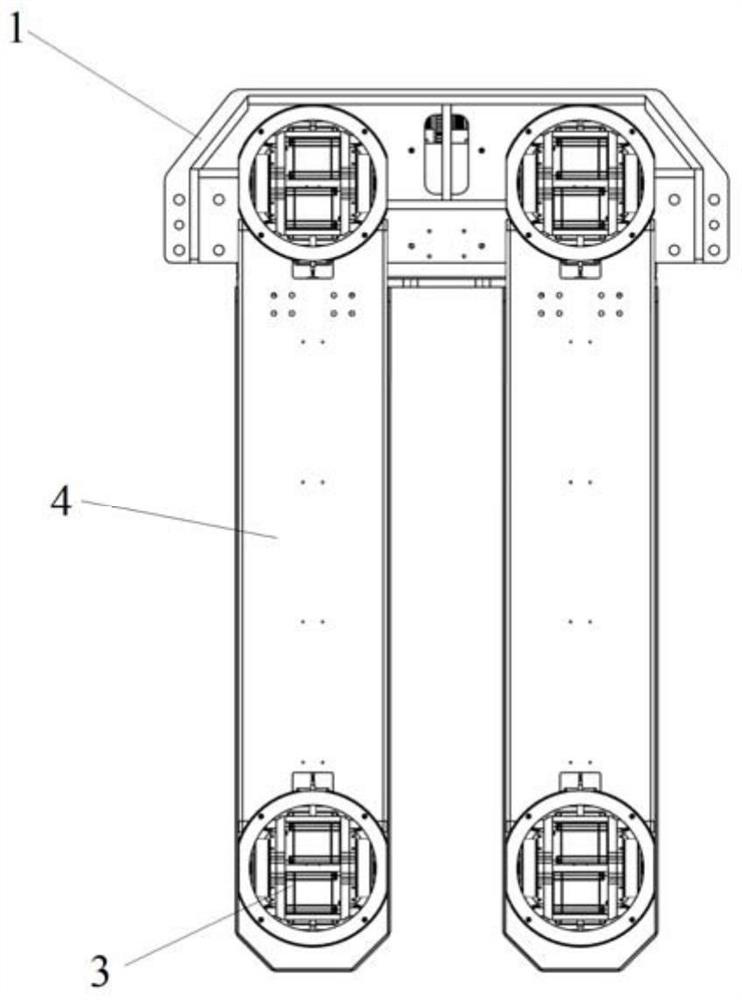
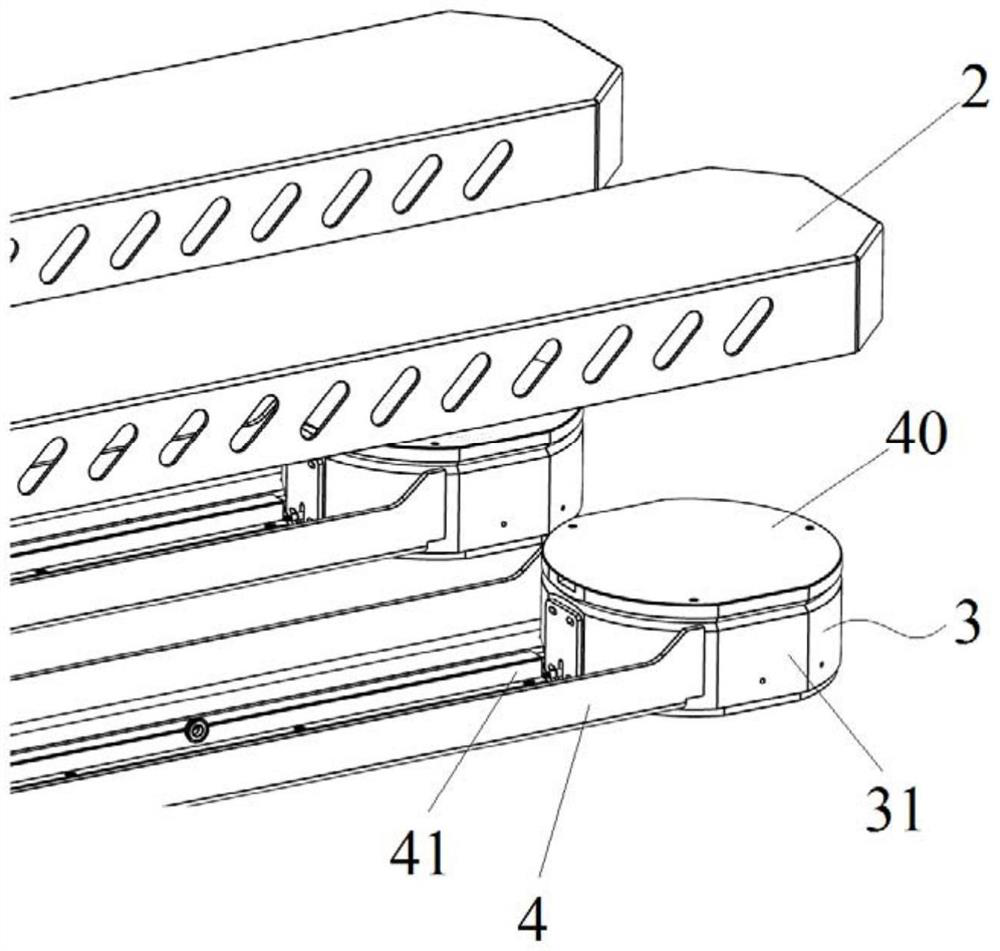
[0048] Two-wheel route driver, such as Figure 4 and Figure 9 The differential drive unit including the mounting disk 31 and the mounting disk 31 is provided, and the mounting disk 31 is a cylindrical shape, and the top end is provided with a fixed disk 38, and an angle sensor 5 is provided on the differential drive unit, an electromagnetic push rod 9, a side roller. The 34 and top rollers 35, the side rollers 34 are rolled in contact with the mounting disk 31, and the top rollers 35 are rolled with the fixed disc 38, and the electromagnetic push rod 9 is set in the diameter direction of the mounting disk 31, such as Figure 10 The inner wall ring of the mounting disk 31 is provided with a plurality of locking sockets 311 that matches the electromagnetic push rod 9;
[0049] When the angle sensor 5 detects the steering angle of the differential drive unit, when the differential drive unit is rotated to a steering angle, the electromagnetic push rod 9 projects the push rod, insert th...
Embodiment 2
[0057] In the present embodiment, a two-wheel differential driving device further includes approaching switch 7, and a first mounting plate 39 is provided on the outer side wall of the mounting disk 31, and the proximity switch 7 is fixed to the first mounting plate 39, and along the mounting disk 31 The diameter direction passes through the sidewall wall of the mounting disk 31, and the initial sensing block 8 that matches the proximity switch 7 is provided on the differential drive unit;
[0058] The proximity switch 7 can sense the initial calibration of the steering angle of the two-wheel differential drive device to be initial induction block 8. Others are the same as in Example 1.
Embodiment 3
[0060] In this embodiment, a stopper 36 is provided on the differential driving unit, and the finish block 6 is provided on the fixed disk 38, and the height of the stopper 36 is matched, and the stopper 36 and the mounting disk 31 axis are between the barriers. The distance between the distance and the limit block 6 and the mounting disk 31 axis, the number of limit block 6 is two, and the two limit block 6 are set along the ring direction of the mounting disk 31, two limit block 6 The angle between the angle is 90 °, when the stopper 36 is blocked, the differential drive unit cannot continue to rotate, realize the limit on the maximum steering angle of the differential drive unit, the maximum steering angle is 270 °, avoid Wreathing the wire connected to the differential drive unit.
[0061] Others are the same as in Example 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More