

Cooperative localization method based on multi-modal map
A collaborative positioning and multi-modal technology, applied in the direction of electromagnetic wave re-radiation, measuring devices, instruments, etc., can solve the problems of large matching error, low precision, strong light dependence, etc., and achieve the effect of precise positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to achieve more accurate positioning and navigation of unmanned vehicles, the present invention fuses different environmental information obtained by laser radar and visual camera scanning, combines the advantages of rapid matching of laser radar and accurate matching of visual marks, and obtains multi-type observations The global map of the data to achieve the effect of precise positioning and navigation of unmanned vehicles in the environment.
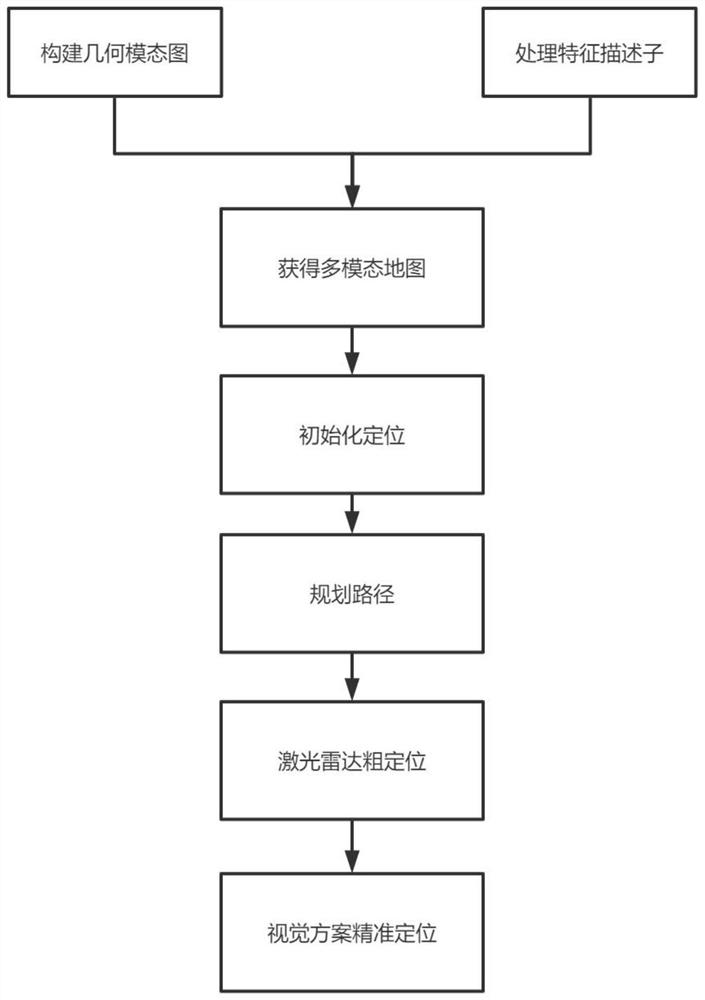
[0028] The implementation flow chart is as follows figure 1 As shown, a co-location method based on multi-modal maps, the steps are as follows:
[0029] Step 1: Obtain scene information through lidar scanning, and construct scene geometric mode map;
[0030] The unmanned vehicle is equipped with lidar to move inside the site, and the whole scene is scanned through the lidar to obtain the environmental information of the current unmanned vehicle location, and the geometric information of the surrounding corners, plane...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More