

Driving arm suitable for medical surgical robot
A technology of surgical robot and active arm, which is applied in the field of active arm, can solve the problems of short length of arc-shaped rotating arm, difficulty in grasping puncture accuracy, and inability to guarantee the stability of puncture needle, etc., so as to achieve the effect of convenient manipulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
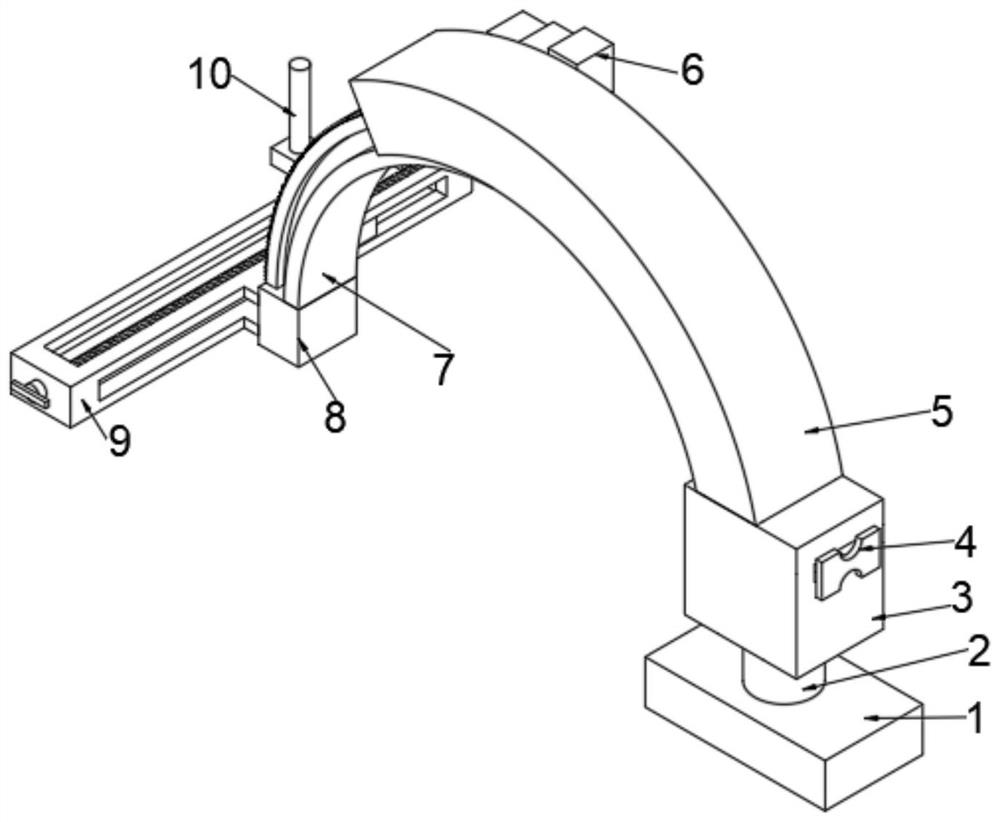
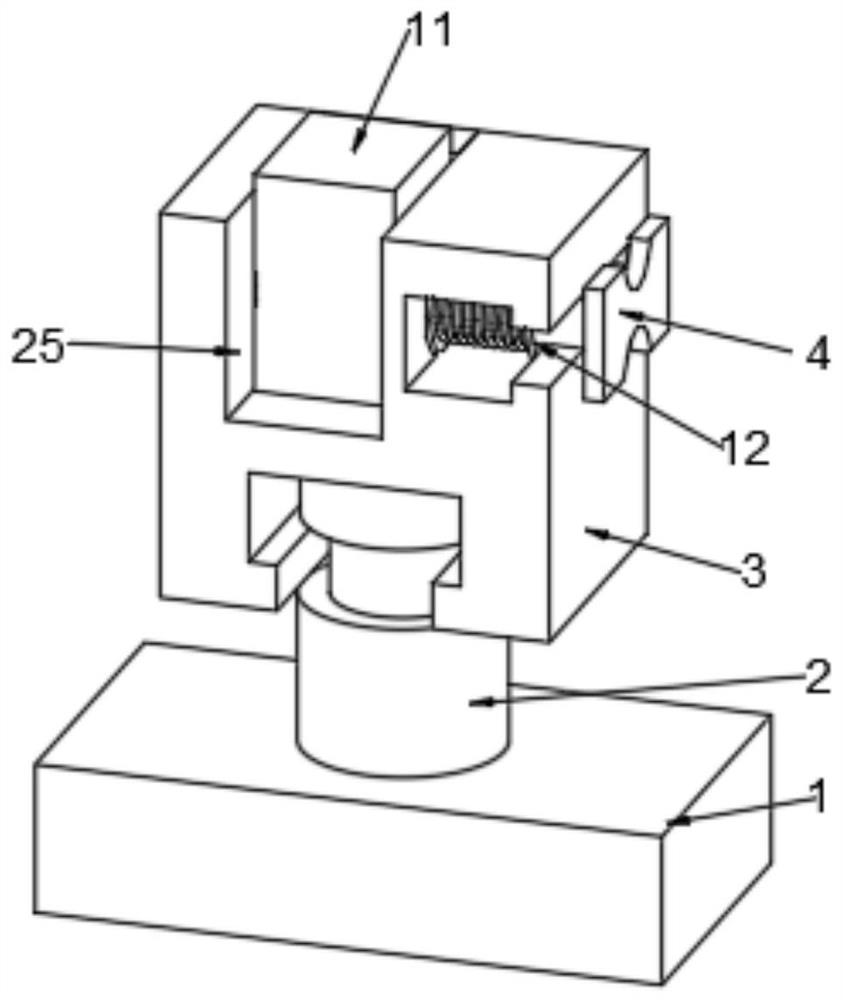
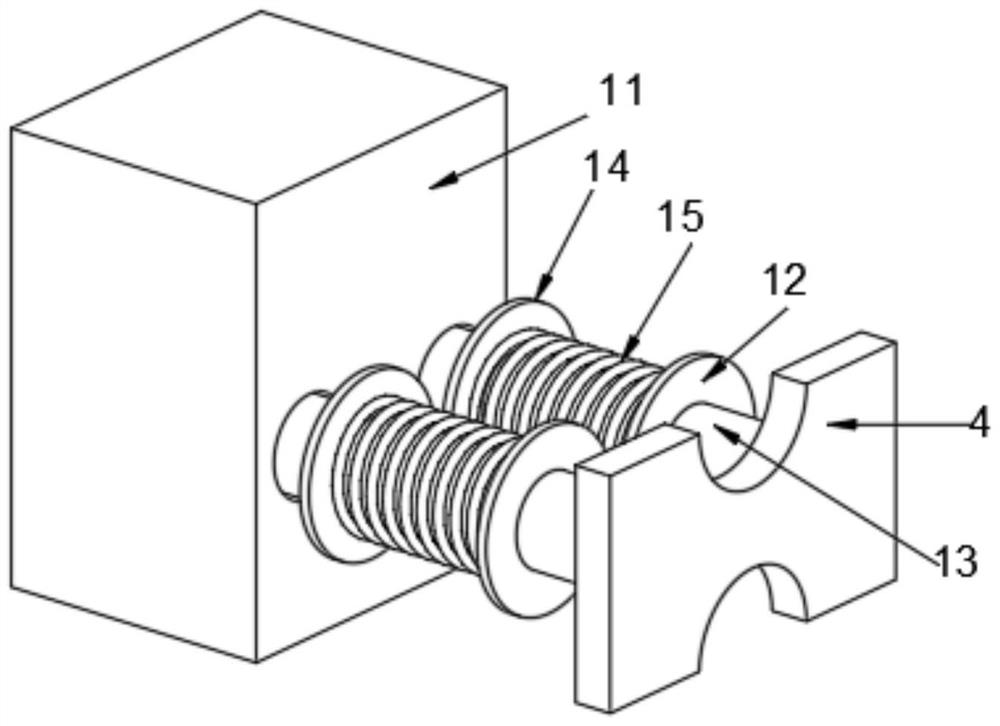
[0031] see Figure 1-Figure 7 , the present invention provides a technical solution: an active arm suitable for a medical surgical robot, including a mounting base 1, a first connecting column 2 is fixedly installed on the top of the mounting base 1, and a limiting ring is arranged on the top of the first connecting column 2 Block, the outer side of the limit ring block at the top of the first connecting column 2 is equipped with a first connecting seat 3, and the inside of the first connecting seat 3 is provided with a first installation cavity and a second connection hole 25, and the inner wall of the first installation cavity is fixed. The first limiting plate 12 is installed, and the inside of two adjacent first limiting plates 12 is equipped with a first movable rod 13, and the same side of the adjacent two first movable rods 13 is fixedly installed with a push plate 4, The outer side of the first movable rod 13 is fixedly installed with the second limiting plate 14, the ...
Embodiment 2
[0038] see Figure 1-Figure 3 , the present invention provides a technical solution: an active arm suitable for a medical surgical robot, including a mounting base 1, a first connecting column 2 is fixedly installed on the top of the mounting base 1, and a limiting ring is arranged on the top of the first connecting column 2 Block, the outer side of the limit ring block at the top of the first connecting column 2 is equipped with a first connecting seat 3, and the inside of the first connecting seat 3 is provided with a first installation cavity and a second connection hole 25, and the inner wall of the first installation cavity is fixed. The first limiting plate 12 is installed, and the inside of two adjacent first limiting plates 12 is equipped with a first movable rod 13, and the same side of the adjacent two first movable rods 13 is fixedly installed with a push plate 4, The outer side of the first movable rod 13 is fixedly installed with the second limiting plate 14, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More