

Form-variable wheel type mechanism based on 4D printing technology
A 4D, morphological technology, applied in the directions of manufacturing auxiliary devices, processing heating elements, processing data acquisition/processing, etc., can solve the problems of complex mechanical structure and control system, reduce reliability, restrict development, etc., to simplify complex mechanical structure, The effect of improving reliability and reducing control difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below in combination with specific embodiments.
[0021] The invention discloses a shape-variable wheel mechanism based on 4D printing technology, which comprises a non-deformable wheel unit and a deformable 4D printing connecting piece.
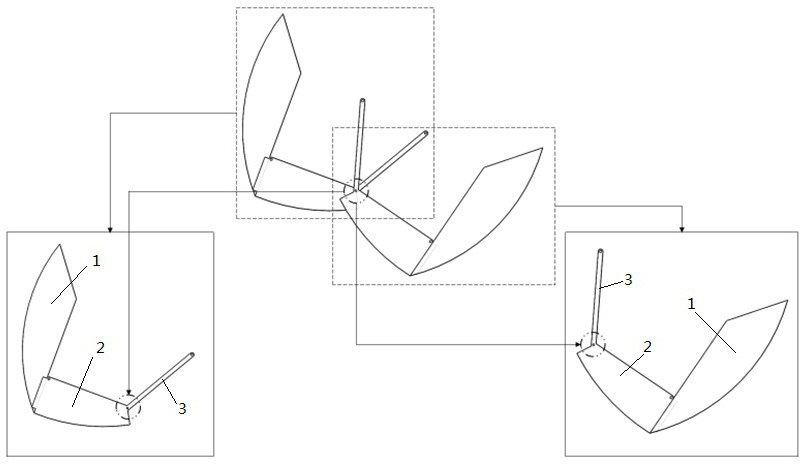
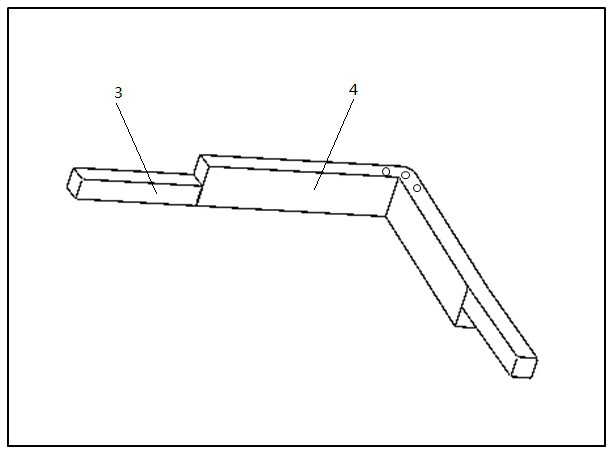
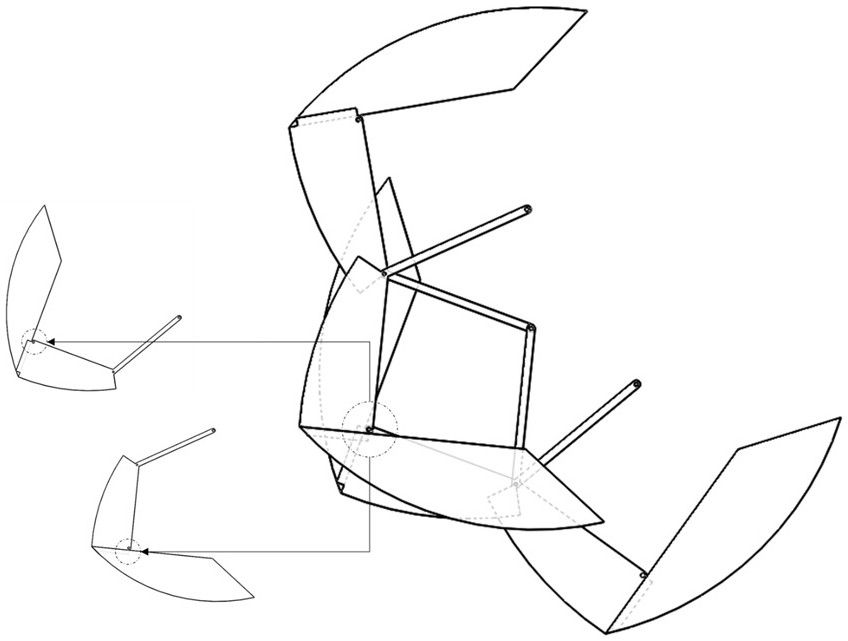
[0022] Such as figure 1 As shown, the non-deformable wheel unit includes a fin-shaped arc-shaped sheet 1 and a trapezoidal-shaped arc-shaped sheet 2 vertically connected to each other through a hinge, and a connecting rod 3 is arranged on the other end angle of the trapezoid-like arc-shaped sheet 2, and the two The two non-deformable wheel units are fixedly connected through the bottom ends of the connecting rods to form a form-controllable angled bar member, and two form-controllable angled bar members are connected to each other through a deformed 4D printing connector 4 connected to the connecting rod 3 .
[0023] Wherein the outer sides of the fin-shaped arc-shaped sheet 1 and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More