

Unmanned ship fuzzy prediction control system and method
A technology of fuzzy prediction and predictive control, applied in control/adjustment system, non-electric variable control, two-dimensional position/course control, etc., can solve the problems of poor feasibility, increase adaptability, and maintain the most desired heading angle The effect of optimizing and reducing the problem of biased estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
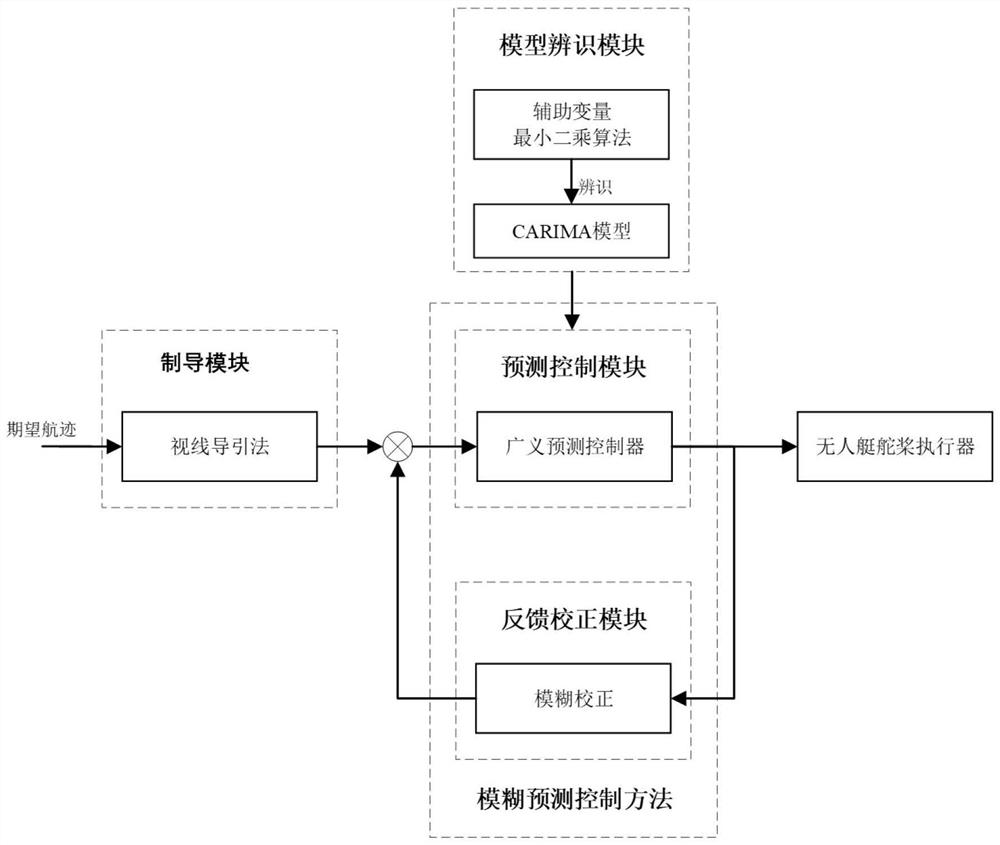
[0162] This example provides an unmanned boat fuzzy predictive control system and method, the system structure block diagram is as follows figure 1 shown, including the following steps:
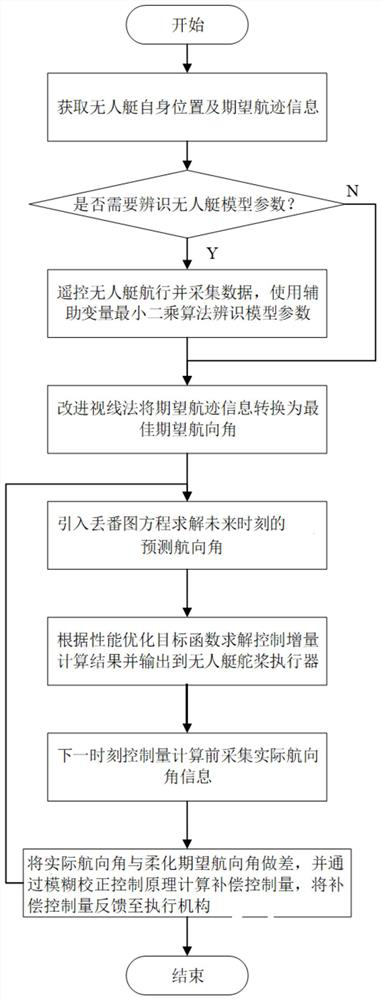
[0163] Such as image 3 As shown in Fig. 1, preparation work: obtain the position of the unmanned boat itself, plan the expected track by the path planning module, and collect the rudder angle and heading angle information collected by the remote control unmanned boat.
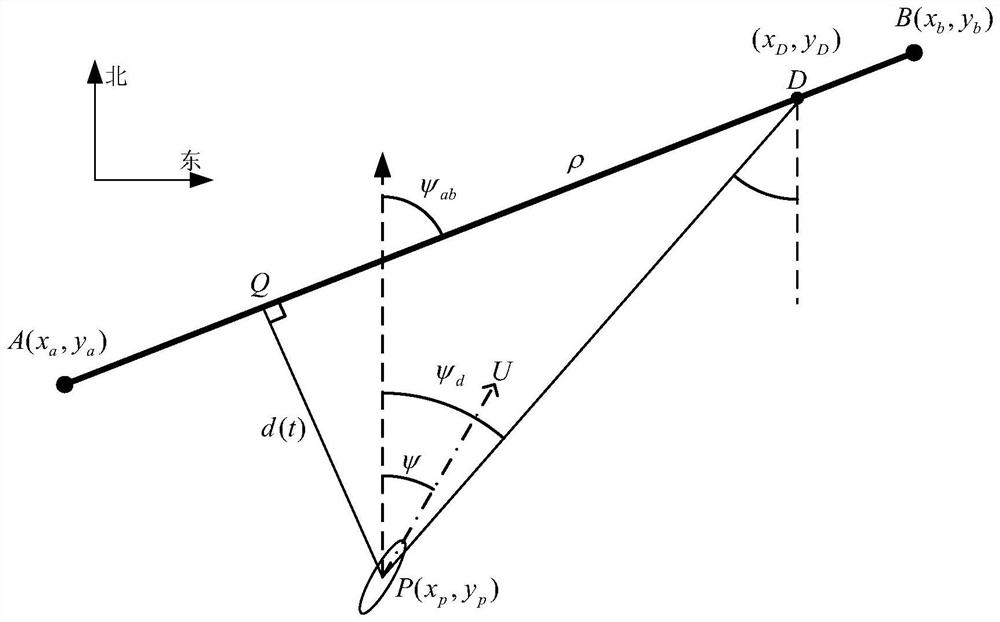
[0164] Step S1: According to the expected trajectory planned by the UAV path planning module and the actual position of the UAV, the optimal expected heading angle is obtained through the adaptive look-ahead distance method to track the desired trajectory. Assuming that the unmanned boat is in the northeast sky coordinate system, a section of expected track vector is A(x a ,y a ) and B(x b ,y b ) represent the coordinates of the starting point and the ending point of the track respectively.
[0165] In order to enabl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More