

Surgical instrument driving device, surgical power device and split surgical device
A driving device and surgical instrument technology, applied in the field of medical equipment, can solve problems such as transmission structure motion errors, achieve the effect of eliminating gap errors and improving transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0061] In the present invention, the split surgical device includes two parts, the instrument and the surgical power unit. The instrument 28 is provided with a universal snake assembly 284 capable of bending in various directions, and the universal snake assembly 284 is connected with an end effector 286. For example, pliers, tweezers, scissors, etc., the end effector 286 is connected to the end of the universal snake assembly 284 away from the surgical power unit, and the surgical power unit is provided with a surgical instrument driving device 30 for outputting power. When the instrument 28 is connected to the surgical power unit At the same time, the power is output by the surgical instrument driving device 30 to release the traction force applied to one or two adjacent traction wires among the four traction wires, and at the same time, to apply traction force to the other one or two opposite traction wires, To make the universal snake assembly 284 bend to the side of the pu...
Embodiment 2
[0110] Based on the same inventive concept, another embodiment of the present invention provides a surgical power device, referring to Figure 12 ,
[0111] It includes a power host 27 and a handle mechanism 26, and the power host 27 includes the surgical instrument driving device 30 described in the first embodiment.
[0112] The power host 27 also includes a casing, and a surgical instrument driving device 30 is disposed in the casing, and a joint seat 38 for detachably connecting the instrument 28 is provided on the surgical instrument driving device 30 .
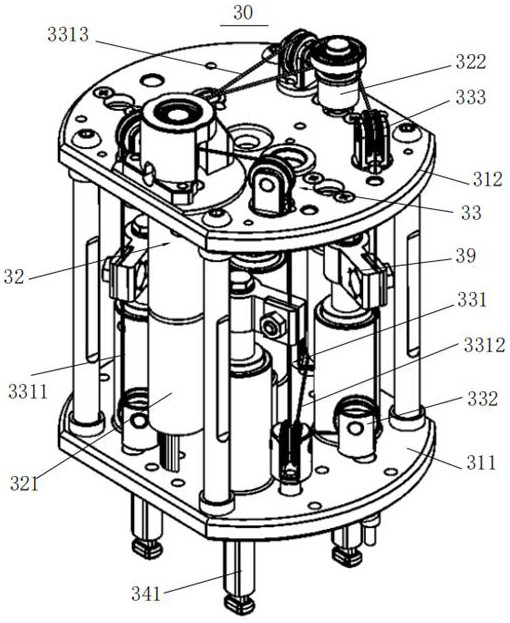
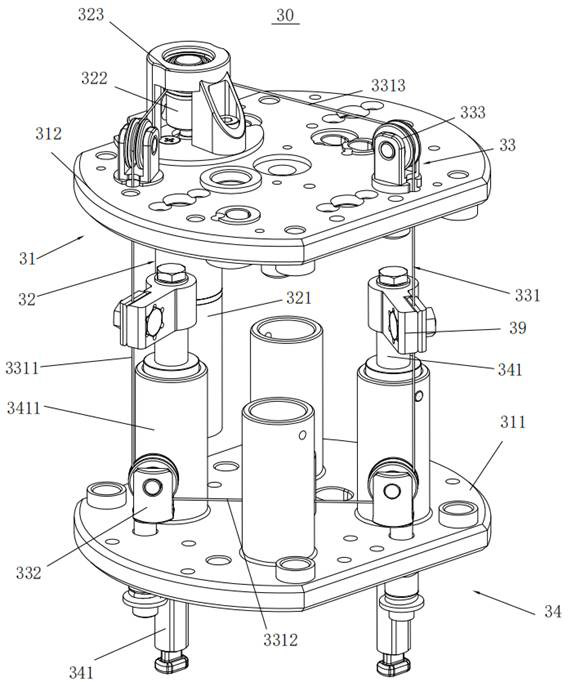
[0113] Among them, in the above-mentioned surgical instrument driving device 30, the power source A32 and the transmission part A33 are provided with two groups, which are used to simultaneously drive the four driving rods A341 to slide, and the projections of the four driving rods A341 on the front fixing plate 311 form rectangular divisions , the two driving rods A341 located on the diagonal are driven by the same gro...
Embodiment 3
[0122] Based on the same inventive concept, another embodiment of the present invention provides a split surgical device, referring to Figure 13 , including the surgical power unit and the instrument 28 mentioned above. The instrument 28 is detachably mounted on the surgical power unit.
[0123] The instrument 28 includes an interface seat 281 , an abdominal entry assembly 282 , a universal snake assembly 284 and an end effector 286 which are sequentially connected. The interface seat 281 is used for detachable connection with the joint seat 38 in the surgical power unit.
[0124] The control handle 265 in the surgical power unit controls the surgical instrument driving device 30 through the adjustment ball assembly 266, thereby controlling the universal snake bone assembly 284 to deflect synchronously following the control handle 265 through the surgical instrument driving device 30. The control handle 265 is provided with a finger buckle assembly 263 , for controlling the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More