

Moving object robust clamping method and clamping system based on speed modulation
A moving object and speed modulation technology, which is applied in chucks, manufacturing tools, program-controlled manipulators, etc., can solve problems such as poor applicability, and achieve the effect of improving clamping accuracy and high clamping success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach
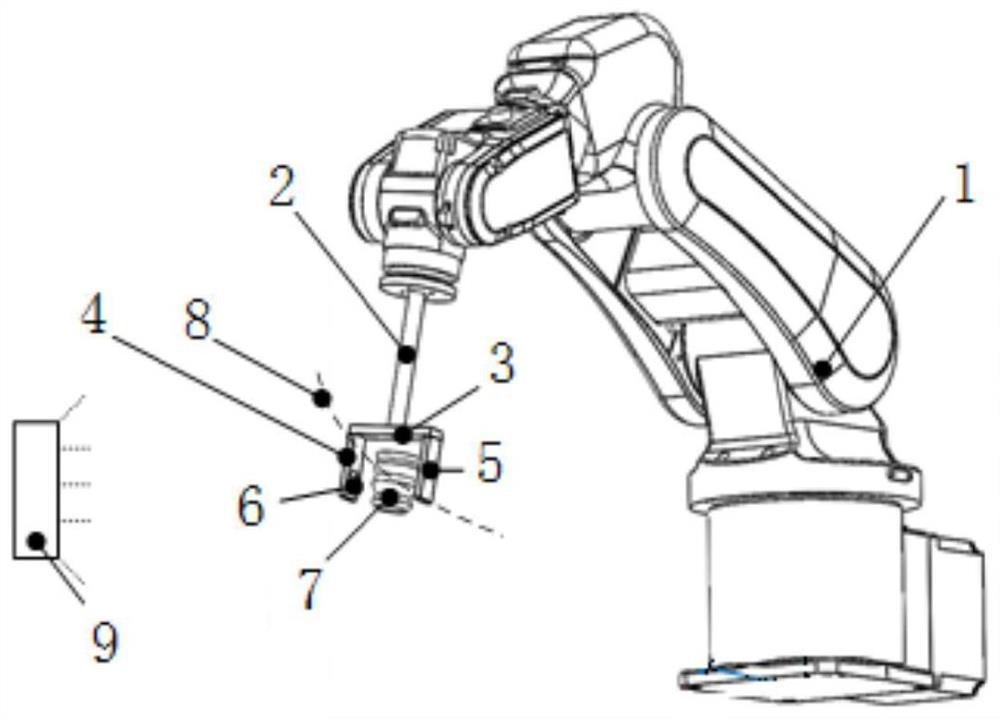
[0042] refer to Figures 2 to 3 , as a preferred embodiment of the present invention, the step S1 specifically includes:
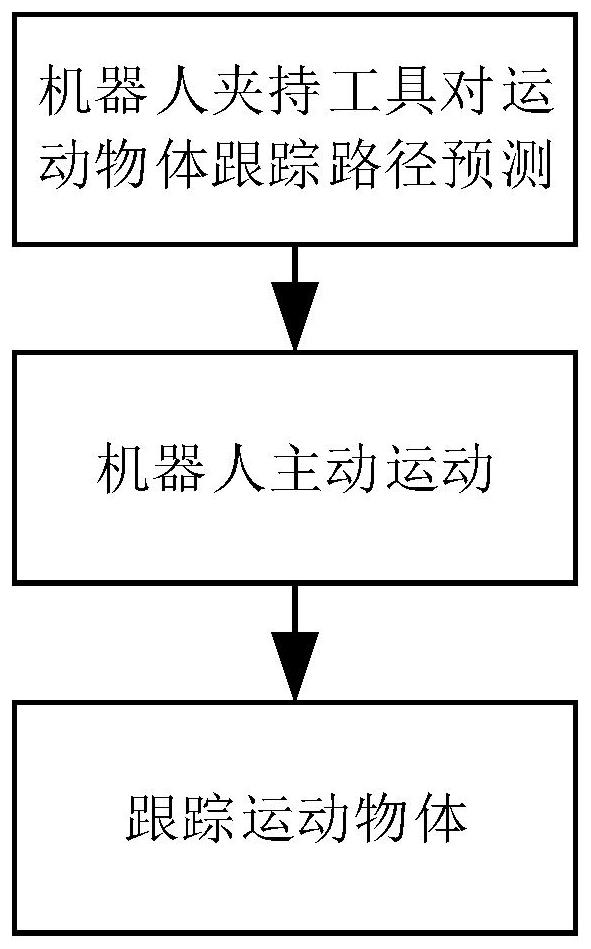
[0043] S11. The clamped workpiece 2 at the end of the robot 1 predicts the tracking path according to the trajectory 8 of the moving object 7;
[0044] S12. The robot 1 performs active motion and controls the clamped workpiece 2 to approach the moving object 7 at high speed.
[0045] refer to figure 2 and Figure 4 , as a preferred embodiment of the present invention, the step S2 specifically includes:
[0046] S21. Start the local vision 3 of the clamped workpiece 2 when the clamped workpiece 2 at the end of the robot 1 successfully tracks the moving object 7;
[0047] S22, clamping the workpiece 2 to collect images of the moving object 7;
[0048] S23. Calculate the geometric center of the moving object 7 according to the collected images;
[0049] S24. Determine the clamping position for clamping the workpiece 2, and fine-tune the position for cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More